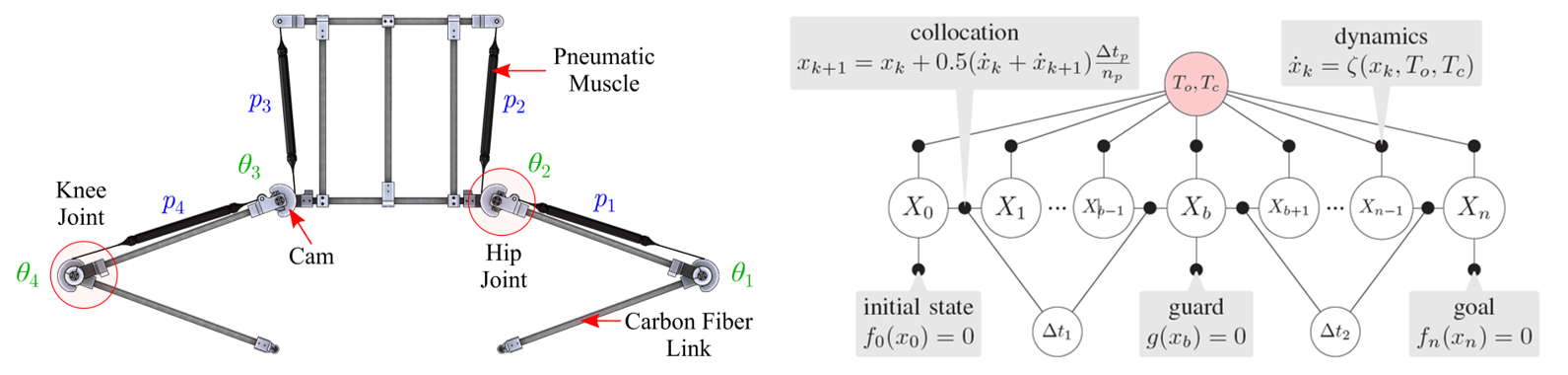
Motivation: Roboticists increasingly seek to incorporate mechanical compliance into legged robots to realize a range of potential benefits, from improved agility to resilience in complex environments. A promising approach for building compliance into robot legs is to utilize the pneumatic artificial muscle, a pneumatic actuator with inherent compliance due to the compressibility of air. While previous work has explored the capabilities of pneumatic-muscle driven robots in highly dynamic tasks like jumping, there is a lack of trajectory planning strategies for such robots. We develop a method for planning vertical jumping trajectories for a planar two-legged robot, driven by four pneumatic artificial muscles using on/off “burst inflation” control (Fig. 1).
Research Focus: In contrast with continuous pressure control approaches, we use a “burst inflation” approach, in which we simply open or close a high-flow solenoid valve to start or stop airflow to each pneumatic muscle. We use a factor graph (Fig. 2) to represent the trajectory optimization problem. We use the optimization library GTSAM to solve the nonlinear programming problem, and generate valve open and close times to achieve a desired jump trajectory.
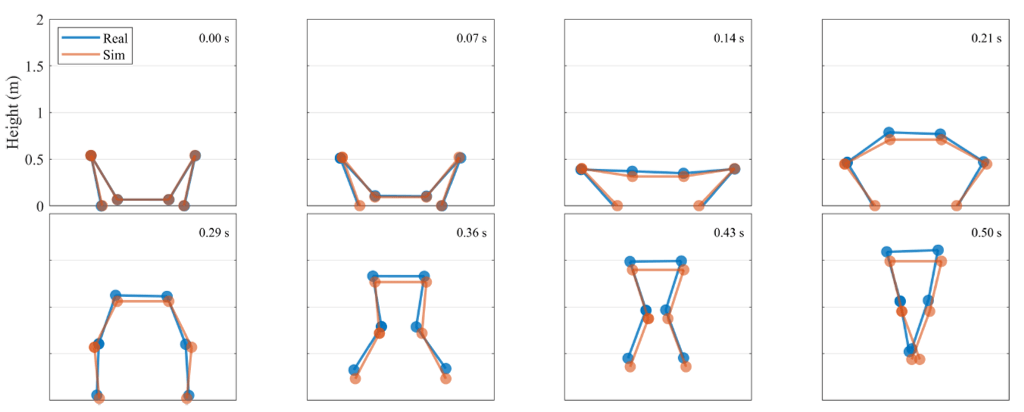
Findings and Implications: In this work, we show initial results for planning vertical jumping trajectories of a two-legged pneumatic muscle driven robot using factor graphs. While simulated and experimental jump heights did not closely agree, the match between simulated and experimental muscle pressures and robot kinematics is promising (Fig. 3). Additional work will be done to refine the system model and identify unknown system parameters to improve trajectory planning accuracy. The entire workflow for this investigation—from simulation, to trajectory optimization and system identification—is streamlined using the factor graph framework.
Researchers
- Lucas Tiziani (PhD Student)
- Yetong Zhang (BORG Lab Member)
Publications
- Factor graph-based trajectory optimization for a pneumatically-actuated jumping robot, L. Tiziani, Y. Zhang, F. Dellaert, and F. Hammond III, 2021 IEEE International Conference on Robotics and Automation (ICRA), (Accepted for Publication)