Passive Ultra-High Frequency (UHF) RFID tags are well matched to robots’ needs. Unlike low-frequency (LF) and high-frequency (HF) RFID tags, passive UHF RFID tags are readable from across a room, enabling a mobile robot to efficiently discover and locate them. Because they don’t have onboard batteries to wear out, their lifetime is virtually unlimited. And unlike bar codes and other visual tags, RFID tags are readable when they’re visually occluded. For less than $0.25 per tag, users can apply self-adhesive UHF RFID tags throughout their home.
UHF RFID Hardware
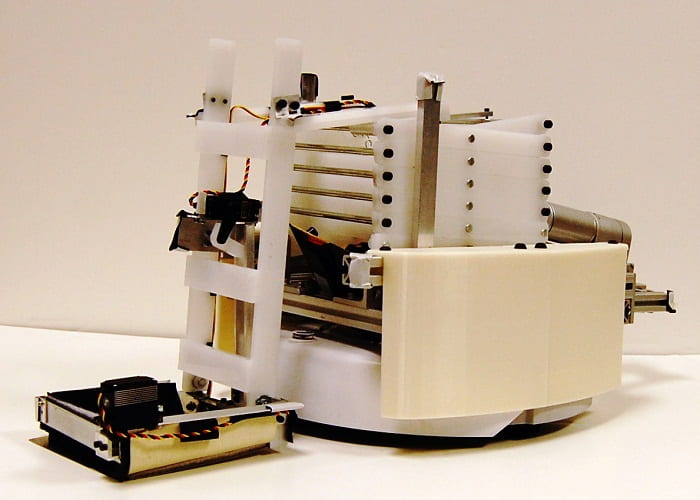
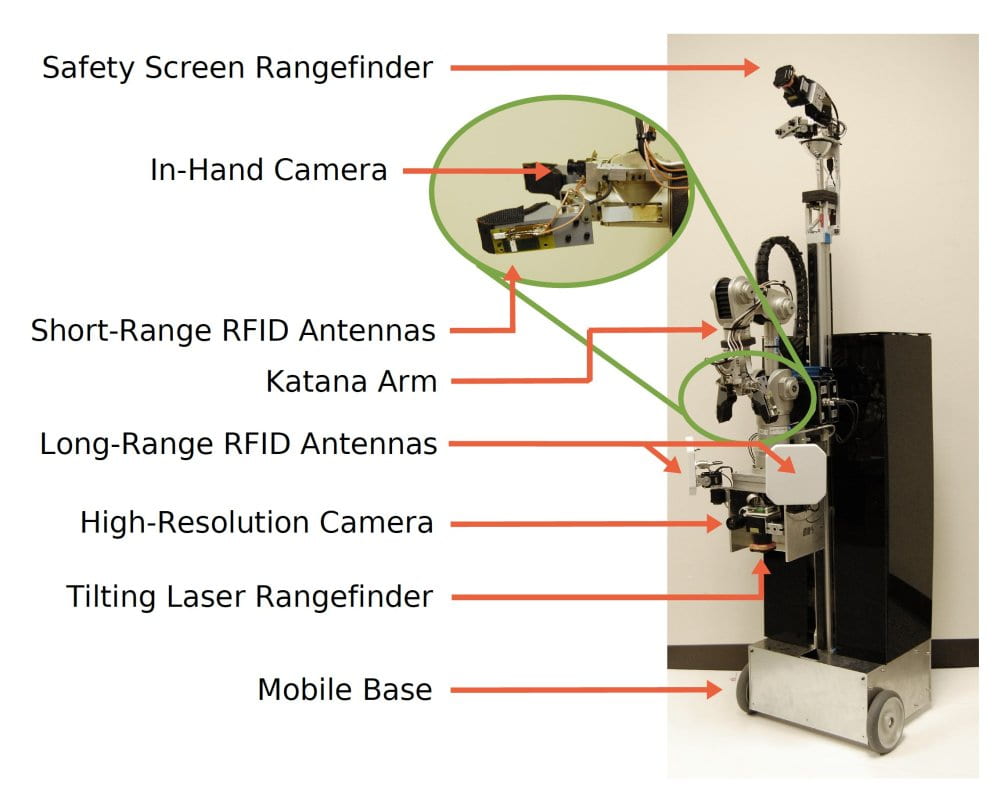
Two <a “href=”http://www.thingmagic.com/””>ThingMagic Mercury 5e (M5e) UHF RFID modules form the core of the robot’s RFID sensors. One is connected to two body-mounted, long-range patch antennas that can read UHF RFID tags out to ~6 meters. The other is connected to custom, short-range, in-hand antennas embedded in the robot’s fingers that can read the exact same UHF tags within ~30cm of the robot’s hand. The hardware is annotated in the figure below.
Capabilities
We have demonstrated a number of capabilities enabled by RFID sensing. The following is a brief list. Refer to the publications for a more detailed information:
Featured Videos
PPS-Tags: Physical, Perceptual and Semantic Tags for Autonomous Mobile Manipulation: Moderate level of environmental augmentation facilitates robust robot behaviors.
Additional Videos:
Publications
- Finding and Navigating to Household Objects with UHF RFID Tags by Optimizing RF Signal Strength, Travis Deyle, Matt Reynolds, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014
- In-Hand Radio Frequency Identification (RFID) for Robotic Manipulation, Travis Deyle, , , and Charles C. Kemp, IEEE International Conference on Robotics and Automation, 2013
- RFID-Guided Robots for Pervasive Automation, Travis Deyle, Hai Nguyen, Matt Reynolds, and Charles C. Kemp, IEEE Pervasive Computing, 2010
- PPS-Tags: Physical Perceptual and Semantic Tags for Autonomous Mobile Manipulation, Hai Nguyen, Travis Deyle, Matt Reynolds, and Charles C. Kemp, IROS 2009 workshop: Semantic Perception for Mobile Manipulation, 2009
- RF Vision: RFID Receive Signal Strength Indicator (RSSI) Images for Sensor Fusion and Mobile Manipulation, Travis Deyle, Hai Nguyen, Matt Reynolds, and Charles C. Kemp, IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), 2009
- Probabilistic UHF RFID tag pose estimation with multiple antennas and a multipath RF propagation model, Travis Deyle, Charles C. Kemp, and Matt Reynolds, IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), 2008
- A Foveated Passive UHF RFID System for Mobile Manipulation, Travis Deyle, Cressel Anderson, Charles C. Kemp, and Matt Reynolds, IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), 2008
Support
Our work is generously supported in part by the Health Systems Institute and by Travis’ NSF Graduate Research Fellowship (GRFP).
Additional Videos
RF Vision: RFID Receive Signal Strength Indicator (RSSI) Images for Sensor Fusion and Mobile Manipulation: Long-range UHF RFID sensing and multi-sensor fusion for mobile manipulation.