ME 4012 – Modeling and Control of Motion Systems
Class Webpage | Class Youtube Channel
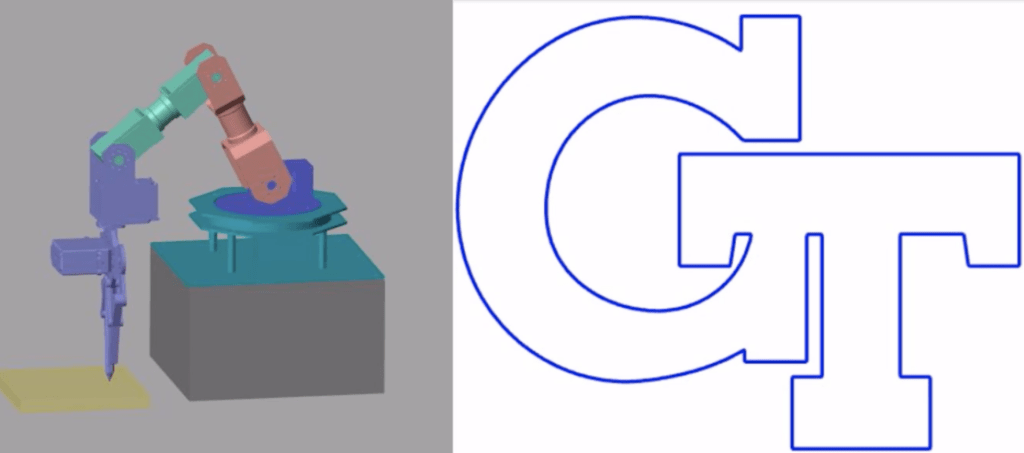
ME 4012 teaches practical modeling and linear control methods for stable, unstable, and complex motion systems. Mechanical, fluidic, thermal and electrical components are analyzed, modeled, and controlled using frequency domain and time domain techniques. Hands-on laboratory experiments including magnetic levitation and balancing of a Segway-like balancing robot using the LabVIEW on the myRIO system or C programming using Arduino. The class includes a final team project where students build and control a robot or other dynamic system of their choice. ME4012 is part of the Minor in Robotics program at Georgia Tech. The class pre-requisite is ME3017 (System Dynamics) or equivalent.
ME 6407 – Graduate Robotics
Class Webpage | Class Youtube Playlist
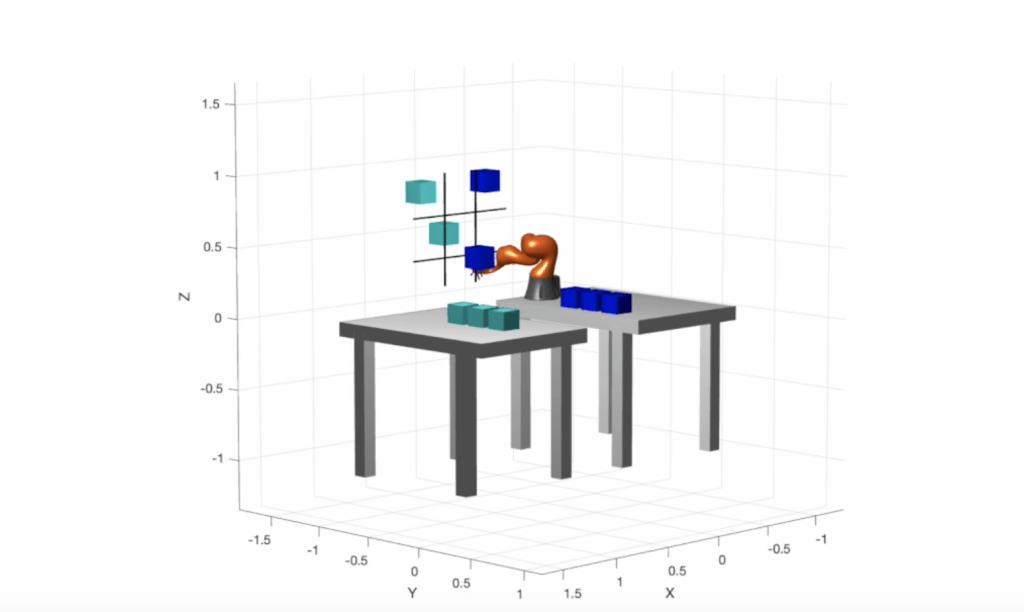
ME 6407 is a graduate-level robotics class that teaches kinematics and dynamics robotic systems. Modeling techniques including homogeneous transform matrices, screw theory, exponential coordinates of rotation, Lagrange, and generalized forces are discussed. Linear and nonlinear control techniques, path planning methods, and motion planning algorithms are also covered in this class. The class has no final but does include a final team project where students build or simulate a robot and plan complex paths to complete tasks of their choice.