 Continuum and soft robotics focuses on the study of redundant or flexible mechanisms and their applications to autonomous systems. Due to the redundant and compliant nature of these mechanisms, new challenges arise in the development of actuation architectures and conformation/shape sensing. To better understand these systems, our laboratory designs and tests new actuation systems and sensor typologies. Soft and continuum robots have many applications, including medical robotics, grasping, and locomotion applications.
Continuum and soft robotics focuses on the study of redundant or flexible mechanisms and their applications to autonomous systems. Due to the redundant and compliant nature of these mechanisms, new challenges arise in the development of actuation architectures and conformation/shape sensing. To better understand these systems, our laboratory designs and tests new actuation systems and sensor typologies. Soft and continuum robots have many applications, including medical robotics, grasping, and locomotion applications.
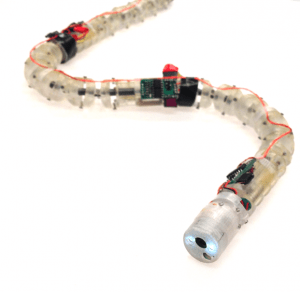
Through our work, we have developed tension-stiffening catheter systems, which utilize friction-based stiffening mechanisms and alternating actuation to advance catheters through pleural cavities. For colonoscopic procedures and natural oriface translumenal endoscopic surgery, we have developed larger 10 to 15 mm diameter robotic endoscopes with different types of actuation systems and sensor architectures. In addition to using conventional sensors to determine continuum robot configurations, we have also developed two-axis soft polymer bend sensors materials and systems that can be embedded directly into the robot for bend sensing. These robotic endoscopes can also be designed as modular segments, which can be linked together to create multiple bends throughout their meter-long lengths. By using path planning algorithms, this system can be used to navigate paths through the colon and create different types of forward locomotion. This platform can be used by clinicians for assisted tool positioning, closed-loop position control, visual feature tracking and image stabilization, built-in force limits to prevent damage to tissues, and haptic feedback. Currently, the laboratory is working on methods for simplified manufacturing of continuum robotic systems, grasping platforms, the development of new bend/extend/compress actuators, and optical sensor systems for endoscopy. We are also interested in new actuation architectures, exploring new conformation sensing paradigms, and developing platforms for applying these tools.
Recently, we have developed a fully soft electromagnetic actuator architecture using liquid metals and compliant magnetic composites. We have also demonstrated new soft actuator designs that move in unique multi-dimensional ways using controllable constraint mechanisms.
Selected Publications:
- (*) R. Balak and Y. C. Mazumdar, “Multi-Modal Pneumatic Actuator for Twisting, Extension, and Bending, ” Proceedings of the 2020 IEEE International Conference on Intelligent Robots and Systems (IROS), 2020. [Accepted]
- (*) N. Kohls, I. Abdeally, B. P. Ruddy and Y. C. Mazumdar, “Design of a Xenia Coral Robot using a High-stroke Compliant Linear Electromagnetic Actuator,” ASME Dynamic Systems and Control Conference (DSCC), 2020. [Accepted]
- (*) N. Kohls, B. Dias, Y. Mensah, B. P. Ruddy, and Y. C. Mazumdar, “Compliant Electromagnetic Actuator Architecture for Soft Robotics, ” Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), pp. 9042-9049, 2020. [In Press]
- Y. Chen, J. Liang and I. W. Hunter, “Modular Continuum Robotic Endoscope Design and Path Planning,” Proceedings of the 2014 IEEE International Conference on Robotics and Automation, pp. 5393-5400, 2014.
[http://dx.doi.org/10.1109/ICRA.2014.6907652] - Y. Chen, J. M. Oliveira and I. W. Hunter, “Two-Axis Bend Sensor Design, Kinematics and Control for a Continuum Robotic Endoscope,” Proceedings of the 2013 IEEE International Conference on Robotics and Automation, pp. 696-702, 2013. [http://dx.doi.org/10.1109/ICRA.2013.6630650] [Finalist for Best Medical Robotics Paper for ICRA 2013]
- Y. Chen, J. M. Oliveira and I. W. Hunter, “Sensor Architecture for a Two-Actuator Robotic Endoscope Tip,” 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 8340-8343, 2011. [http://dx.doi.org/10.1109/IEMBS.2011.6092057]
- J. M. Oliveira, Y. Chen and I. W. Hunter, “Robotic Endoscope Motor Module and Gearing Design,” 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 7380-7383, 2011.[http://dx.doi.org/10.1109/IEMBS.2011.6091659]
- Y. Chen, S. Tanaka and I. W. Hunter, “Disposable Endoscope Tip Actuation Design and Robotic Platform,” 32nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 2279-2282, 2010. [http://dx.doi.org/10.1109/IEMBS.2010.5627677]
- Y. Chen, J. H. Chang, A. S. Greenlee, K. C. Cheung, A. H. Slocum and R. Gupta, “Multi-turn, Tension-stiffening Catheter Navigation System,” Proceedings of the 2010 IEEE International Conference on Robotics and Automation, pp. 5570-5575, 2010. [http://dx.doi.org/10.1109/ROBOT.2010.5509786]
- R. Z. Pytel, E. L. Thomas, Y. Chen, and I. W. Hunter, “Anisotropic Actuation of Mechanically Textured Polypyrrole Films,” Polymer, vol. 49, no. 5, pp. 1338-1349, 2008.[http://dx.doi.org/10.1016/j.polymer.2008.01.006].