
Active Projects
(Updated May 2023)
1) Rapid Operator Awareness with Mobile Robotics (ROAMR)

This project seeks to combine mobile sensors with wearable robots to enhance human performance in unstructured environments. This project is in collaboration with Dr. Aaron Young and the Georgia Tech EPIC lab. Graduate Students: Carlos Carrasquillo, Divya Iyengar.
2) Motion Planning for Aggressive Aerial Vehicles

3) Autonomous Drilling for Geothermal Energy

4) Intelligent Control of Biological Processes

5) Antro-Robotic Squadron for Efficient Navigation and Localization (ARSENAL)

Workers are required to carry or wear heavy equipment in industrial, agricultural, and military jobs. This project seeks to provide a UGV teammate capable of identifying human targets, following desired paths to a target, and offloading weight from a human teammate. Additionally, this project investigates the energetics and performance of the human-robot team during transportation tasks. Graduate Student: Joshua Fernandez
6) Multi-Fidelity Aero Modeling
Image Coming Soon
Completed Projects
1) Robot Integrated Pallet System (RIPS)

2) Adaptive Ground Locomotion
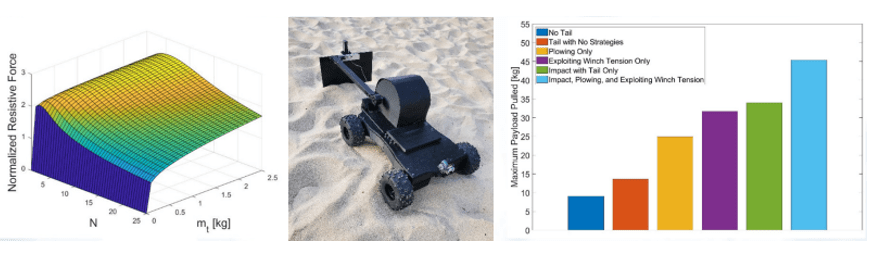

This project seeks to combine adaptive algorithms with morphological adaptation. Specifically, we are studying ways to modulate vehicle physical properties in order to maximize their autonomous performance on diverse terrain. Specifically, we investigate how to enhance vehicle mobility and their ability to transport heavy payloads. This project is in collaboration with Dr. Byron Boots at the University of Washington. Graduate Students: Raymond Kim, Joshua Fernandez, Adam Foris.
3) Exploiting Smart Mechanics for Manipulation

4) Human Machine Collaboration for Manufacturing
5) Multi-functional Drone Landing Gear and Docking Station for Robust Perching and Autonomous Charging
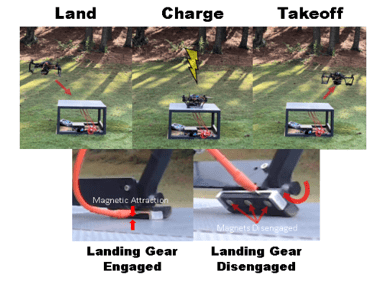
Unmanned aerial vehicles (UAVs) can positively impact a variety of fields including agriculture, environmental monitoring, disaster response, and national security. However, UAV performance is fundamentally limited by battery life. Recharging often requires returning to a fixed base and physically changing the battery. However, this paradigm is restrictive, time-consuming, and human-labor intensive. This project provides a novel multi-functional docking station system and landing gear that can enable diverse missions. Specifically, this system facilitates quadcopter landing on a platform, provides strong attachment to handle disturbances, and enables autonomous recharging. This project is in collaboration with Dr. Jonathan Rogers and is a subject of continued research in his lab. Graduate Students: Joshua Fernandez.