Overview
YouTube Recording: The recording for the Learning for Caregiving Robots workshop is now live on YouTube! A huge thank you again to all of the speakers and attendees.
Slack (for Zoom link, discussion, and Q/A): https://join.slack.com/t/learningforca-9j78633/shared_invite/zt-qlb8sgph-MAl26xEFPSCoQLaxuPaq2Q
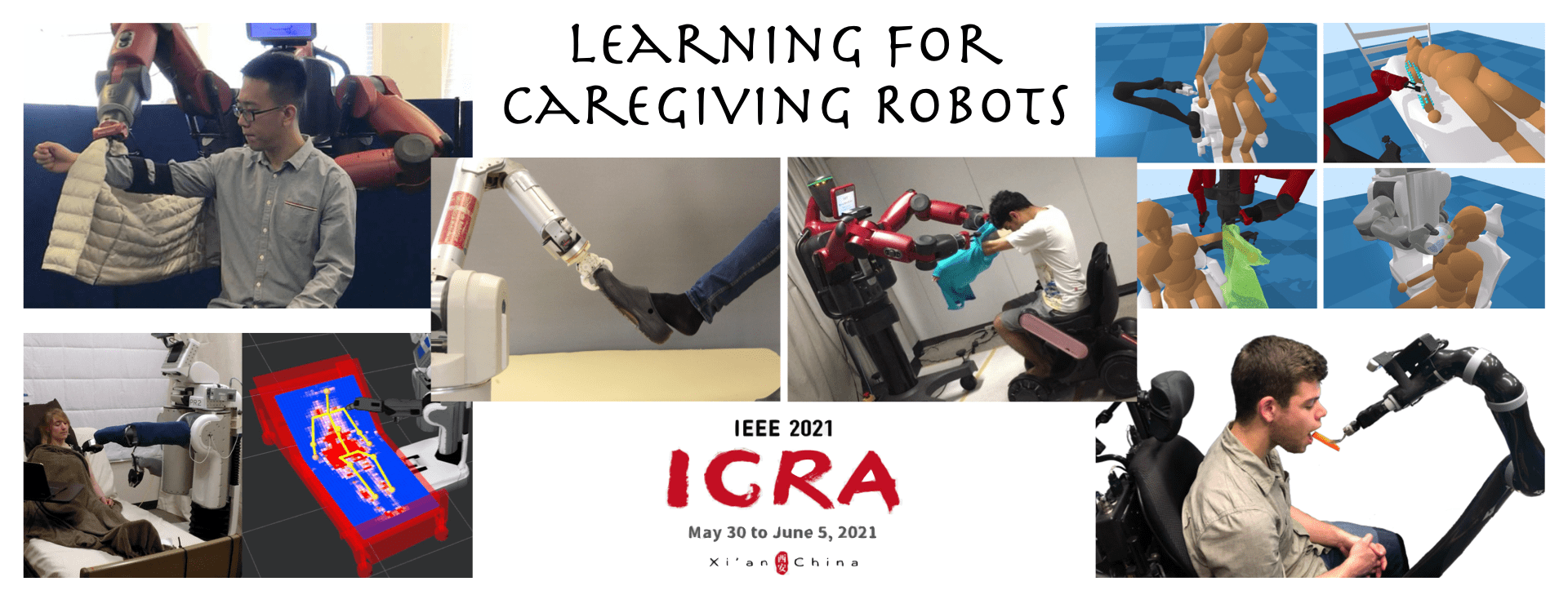
Robotic caregivers could increase the independence of people with disabilities, improve quality of life, and help address growing societal needs, such as shortages of healthcare workers, aging populations that require care, and high healthcare costs. Using robotic technology to assist care-recipients in their daily lives may entail physically interacting with them, adapting to their preferences, and perceiving the environment for intelligent and safe assistance. These tasks can benefit from using data-driven machine learning techniques. Through this workshop, we explore how learning can enable robotic systems towards achieving consistently efficient and safe assistance across activities of daily living.
Learning for caregiving in real homes depends on sensing and acting using real-world systems as well as metrics for success and generalization. Through a series of three correspondingly themed sessions, this workshop will provide a forum for discussion on the state-of-the-art, current challenges, and future of learning paradigms in robotic caregiving. By bringing together renowned scientists and young researchers from the machine learning and assistive robotics communities, this workshop aims to inspire cross-discipline collaborations towards solutions that can beneficially impact human society.
Important Dates
Paper Submission Deadline: April 23, 2021. April 30, 2021
Notification of Acceptance: April 30, 2021. May 7, 2021
Camera-Ready Deadline: May 21, 2021
Workshop Date: May 31, 2021
Call for Contributions
Congratulations to our Best Presentation Award winner!
Affordance-Aware Handovers with Human Arm Mobility Constraints
Paola Ardón, Maria E. Cabrera, Èric Pairet, Ronald P. A. Petrick, Subramanian Ramamoorthy, Katrin S. Lohan, and Maya Cakmak
We welcome submissions across the domains of machine learning, robotic caregiving, human-robot interaction, haptics, biomechanics, perception, simulation, and human assistance. As we aim to encourage meaningful discussion across these fields, work that is unpublished, recently published or under review can be accepted for presentation. Best Workshop Presentation will be given to an outstanding contribution, with a $1000 award, generously sponsored by Hello Robot.
We solicit contributions in the form of:
- Extended abstracts (min 2 pages, max 4 pages) in IEEE paper format.
All PDF submissions (and video demo links) should be sent to: lcr.icra2021@gmail.com
- Papers will be presented at the workshop with accompanying spotlight talks (and workshop posters pending in-person participation).
- Authors are welcome to submit a video demo with their contribution.
- Accepted paper contributions will appear on the workshop website. Authors retain all the intellectual properties of their contributions.
- Award certificate and a $1000 award for the Best Workshop Presentation will be given to an outstanding contribution.
Topics of Interest
- Robotic caregiving / physical human assistance
- Learning
- Human-robot collaboration
- Physical human-robot interaction
- Personalization and adaptation
- Haptic sensing
- Multimodal perception
- Active perception
- Human pose sensing/estimation
- Deep learning for safe human-robot interaction
- Physics simulation and benchmarking
- Generalization of learned models to real-world assistive scenarios
Invited Speakers








Organizers






Workshop Program
| Time (ET) (GMT-04) | |
| 10:00 – 10:15 | Welcome – Workshop opening |
| 10:15 – 11:15 | Opening Session – Learning for Robotic Caregivers: Perspectives from 3 Continents (US, Europe, Asia) – Prof. Tomohiro Shibata, Kyushu Institute of Technology, Japan. – Prof. Yiannis Demiris, Imperial College London, UK. – Dr. Tapomayukh Bhattacharjee, University of Washington, US. |
| (Session) Sensing and Acting: intelligent sensing, systems and control for robot caregivers | |
| 11:15 – 11:45 | Prof. Henny Admoni, Carnegie Mellon University, US. |
| 11:45 – 12:15 | Prof. Laurel Riek, UC San Diego, US. |
| 12:15 – 12:45 | Prof. Brenna Argall, Northwestern University, US. |
| 12:45 – 13:00 | Break |
| 13:00 – 13:15 | Contributor Presentation Antonio Andriella, Learning In Situ Personalised Robot Assistance From Therapist’s Demonstrations and Knowledge |
| 13:15 – 13:30 | Contributor Presentation Paola Ardón, Affordance-Aware Handovers with Human Arm Mobility Constraints |
| 13:30 – 14:00 | Panel Discussion – The role of learning and autonomy in robotic caregiving
Panelists |
| 14:00 – 15:15 | Lunch break |
| (Session) Learning: roles, applications, and generalization for robot caregivers | |
| 15:15 – 15:45 | Prof. Dongheui Lee, Technical University of Munich, Germany. |
| 15:45 – 16:15 | Prof. Siddhartha Srinivasa, University of Washington, US. |
| 16:15 – 16:45 | Prof. Pieter Abbeel, University of California, Berkeley, US. |
| 16:45 – 17:00 | Presentation by Hello Robot Dr. Aaron Edsinger, Hello Robot, US. |
| 17:00 – 17:45 | SpatialChat and Break |
| (Session) Modeling and Benchmarking: modeling and benchmarking for robot caregivers | |
| 17:45 – 18:15 | Prof. C. Karen Liu, Stanford University, US. |
| 18:15 – 18:45 | Dr. Jeremy Marvel, National Institute of Standards and Technology, US. |
| 18:45 – 19:15 | Prof. Michelle Johnson, University Of Pennsylvania, US. |
| 19:15 – 19:45 | Panel Discussion – Grand challenges in robotic caregiving
Panelists |
| 19:45 – 20:00 | Awards Ceremony and Closing |
Sponsor

Support and Endorsement
IEEE RAS technical committee on Robot Learning
IEEE RAS technical committee on Rehabilitation and Assistive Robotics
IEEE RAS technical committee on Human-Robot Interaction and Coordination