
Welcome

The Lu’s Navigation and Autonomous Robotics (Lunar) Lab at Georgia Tech studies problems related to perception and navigation for robots and autonomous systems in ground, air, and space applications. The lab’s primary goal is to enable robotic systems to operate autonomously in highly unstructured environments under harsh sensing conditions for tasks including search and rescue, daily housework, scientific exploration and discovery. The main research areas of the lab include computer vision, machine learning, deep learning, estimation, and probabilistic inference.
Recent Projects

GaussianFormer3D: Multi-Modal Gaussian-based Semantic Occupancy Prediction with 3D Deformable Attention
Lingjun Zhao, Sizhe Wei, James Hays, Lu Gan
ICRA 2026, RSS 2025 Gaussian Representations for Robot Autonomy Workshop
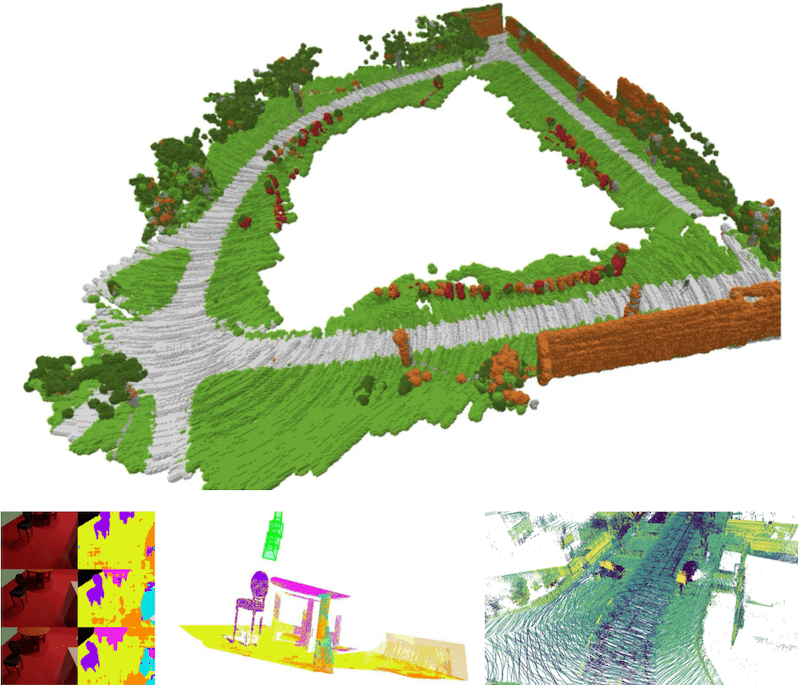
GaussianFormer3D is a LiDAR-camera semantic occupancy prediction framework based on a compact and continuous object-centric scene representation.

ShelfGaussian: Shelf-Supervised Open-Vocabulary Gaussian-based 3D Scene Understanding
Lingjun Zhao*, Yandong Luo*, James Hays, Lu Gan
ShelfGaussian is an open-vocabulary multi-modal Gaussian-based 3D scene understanding framework supervised by off-the-shelf vision foundation models.

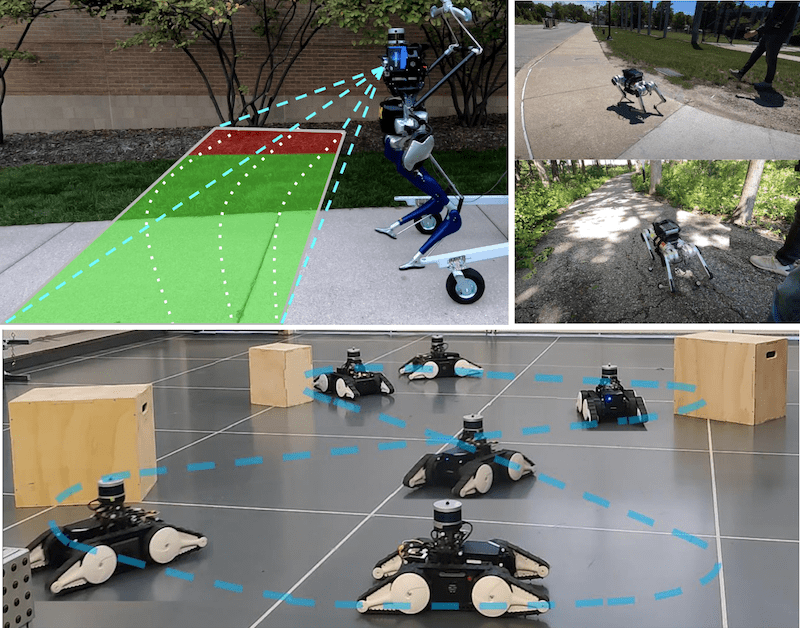
MS-PPO: Morphological-Symmetry-Equivariant Policy for Legged Robot Locomotion
Sizhe Wei*, Xulin Chen*, Fengze Xie, Garrett Ethan Katz, Zhenyu Gan, Lu Gan
MS-PPO is a PPO variant featuring a morphological-symmetry-equivariant actor and a morphological-symmetry-invariant critic network.

STATE-NAV: Stability-Aware Traversability Estimation for Bipedal Navigation on Rough Terrain
IEEE RA-L, 2025
Ziwon Yoon, Lawrence Y. Zhu, Jingxi Lu, Lu Gan, Ye Zhao
STATE-NAV is a learning-based humanoid traversability estimation framework for generalized rough terrain navigation by incorporating bipedal locomotion stability.

Diffusion-Denoised Hyperspectral Gaussian Splatting
Sunil Kumar Narayanan, Lingjun Zhao, Lu Gan, Yongsheng Chen
3DV, 2026
DD-HGS is a 3D hyperspectral reconstruction framework that leverages 3DGS and diffusion-based denoising for high-fidelity spatial and spectral reconstruction.

Morphological-Symmetry-Equivariant Heterogeneous Graph Neural Network for Robotic Dynamics Learning
Fengze Xie*, Sizhe Wei*, Yue Song, Yisong Yue, Lu Gan
L4DC, 2025
MS-HGNN is an efficient deep learning model for robotic dynamics learning, that integrates both robotic kinematic structures and morphological symmetries.

MI-HGNN: Morphology-Informed Heterogeneous Graph Neural Network for Legged Robot Contact Perception
Daniel Butterfield, Sandilya Sai Garimella, Nai-Jen Cheng, Lu Gan
ICRA, 2025
MI-HGNN is a structured deep learning model that incorporates robot morphological constraints; designed as a learning-based contact estimator for legged robots.
See more.
Latest News
- 01/31/2026: Two papers accepted at ICRA 2026. Congrats!
- 01/29/2026: Congrats to Zeina on receiving the PURA Travel Award to present her research at NCUR 2026.
- 01/23/2026: Lu will serve as an Associate Editor for IROS 2026.
- 11/19/2025: Lu gave a guest lecture in ME 601 Advanced Robotics@University of Wisconsin–Madison.
- 11/19/2025: Our STATE-NAV paper was accepted to IEEE Robotics and Automation Letters (RA-L). Congrats!
- 11/05/2025: Our paper “Diffusion-Denoised Hyperspectral Gaussian Splatting” was accepted to 3DV 2026. Congratulations to the team!
See more.
Lunar Lab Robotics Seminar
- 11/14/2025: Dr. Minghan Zhu is visiting our lab and will give a talk titled 3D Robot Vision for Structured World Understanding: A Physics and Symmetry Perspective.
- 05/27/2025: Dr. Frederike Dümbgen is visiting our lab and will give a talk titled On the Use of Samples for Effortless Certifiable Optimization.
See more.