
BMED 4833 ROB & BMED 8813 ROB at Georgia Tech
Overview

Robotics researchers and futurists have long dreamed of robots that can serve as caregivers. In this project-based course, students learn about future opportunities and present realities for robots that contribute to caregiving. They gain hands-on experience with teleoperation, autonomy, perception, navigation, manipulation, human-robot interaction, and machine learning. They also learn about robot design, healthcare robotics, and entrepreneurship.
* Prof. Kemp took this photo on February 22, 2023 while the teams worked on their midterm projects. All 20 students gave permission for this photo to be posted using an online form.
Final Projects
In the spring term of 2023, three teams created robotic systems to benefit older adults. You can learn about their results here, since they chose to share videos about their projects with the public.
Assistance with Misplaced Objects for People with Mild Cognitive Impairment

Team Blue created a system to help people with mild cognitive impairment (MCI) find misplaced objects. The system periodically goes around the home and takes photos of objects. When a person wants to find an object, they can ask the robot if it’s seen it. The robot then presents them with photos that have objects that match the description and offers to show the person where it took the photo. The team also considered having a lost-and-found box for the robot to put lost objects into.

AI-CARING National Artificial Intelligence (AI) Research Institute (Award #2112633) funded by the National Science Foundation provided support for this project by facilitating mentorship, consultations with experts, and interactions with stakeholders.
Sprout – Robot-Assisted Horticultural Therapy for People with Mobility Impairments

Team Green created Sprout, a system for horticultural therapy for people with mobility impairments. The system helps people take care of plants and share their progress with others. Sprout can water plants, answer questions about horticulture using ChatGPT, and take time-lapse photos.
RoboFetch – Medicine Retrieval and Delivery for People with Parkinson’s Disease

Team Red created RoboFetch, a system to retrieve and deliver an INBRIJA® (levodopa inhalation powder) inhaler to a person with Parkinson’s disease (PD) when they are experiencing an OFF episode that impairs mobility.

Instructor

{kind=link}
Conflict of Interest Statement: This class uses robots from Hello Robot Inc. In addition to being an associate professor at Georgia Tech, Dr. Kemp is a co-founder and the chief technology officer (CTO) of Hello Robot Inc. where he works part time. He owns equity in Hello Robot and is an inventor of Georgia Tech intellectual property (IP) licensed by Hello Robot. Consequently, he receives royalties through Georgia Tech for sales made by Hello Robot. He also benefits from increases in the value of Hello Robot.
Course Materials
- schedule
- syllabus
- project documents
- problem statement
- team icebreakers
- project presentation rubrics
- miscellaneous
A Robot for Each Team

Each team had exclusive use of a Stretch 2 mobile manipulator throughout the term that they could access outside of class and take outside of the classroom for fieldwork. Exclusive use by a team promotes a sense of ownership, including responsibility and care, and avoids the potential for one team to break another team’s work when modifying software and hardware. Each team had a 32″ monitor (Samsung S32D850T LCD Monitor, 2560 x 1440, WQHD resolution) to help team members work together.
Classes
Table of Contents
- Class 1 – How to be Successful in the Class
- Class 2 – Guest Lecture by Dr. Vy Nguyen & Preparing to Form Teams
- Statistics of Responses to the Teaming Information Form
- Class 3 – Team Formation & Robot Safety
- Class 4 – Robot Unboxing & Teleoperation
- Class 5 – A Hands-on Robot Tour & Topic Discussions
- Class 6 – Proposal Discussions
- Class 7 – Proposal Presentation Preparations
- Class 8 – Proposal Presentations for the Midterm Project
- Class 9 – Class Discussion about Midterm Projects
- Class 10 – In-class Work on Midterm Projects
- Class 11 – In-class Work & Votes on Class Changes
- Class 12 – Advice on Stakeholder Interactions
- Class 13 – Early vs. Late Integration of Components
- Class 14 – Preparing to Present in One Week
- Class 15 – Last Class Before Midterm Results Presentations
- Class 16 – Midterm Results Presentations
- Class 17 – Class Discussion about Midterm Results
- Class 18 – Planning for Positive Impact
- Class 19 – Final Proposal Presentations
- Class 20 – Modification to Self/Peer Feedback
- Class 21 – Video Guidelines
- Class 22 – Commercialization
- Class 23 – Making Robot Videos
- Class 24 – Robots in Homes
- Class 25 – Ask Me Anything
- Class 26 – Last Class for Project Work
- Class 27 – Draft Video Viewing Session
- Class 28 – Final Presentations!
Class 1 – How to be Successful in the Class



- Course overview by Prof. Kemp [Google Slides][PDF]
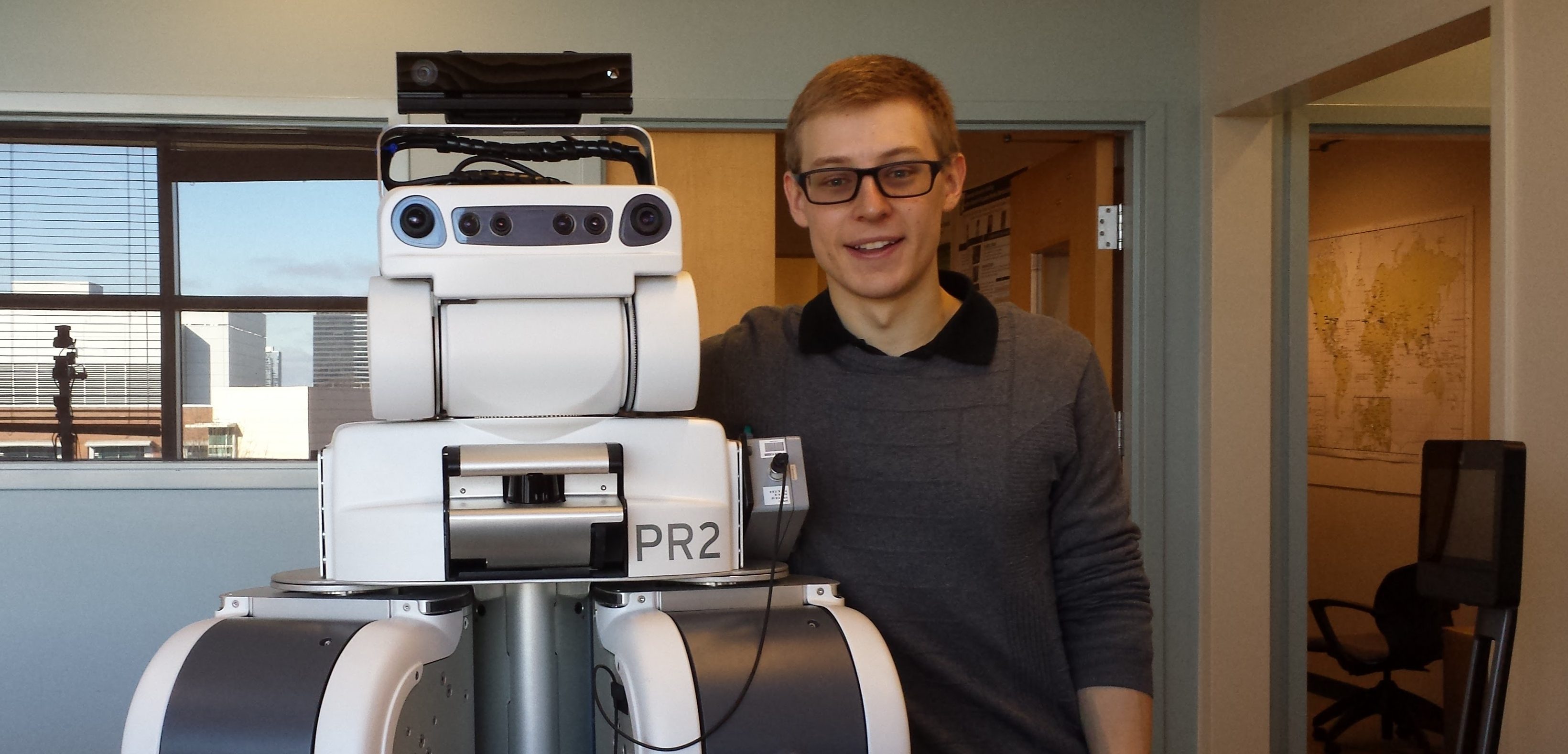
- An example of a successful project from Robotic Caregivers – Fall 2021
- Stretch with Stretch has continued as a funded research effort.
- Matt Lamsey and Youliang Tan provided a live demo of the current system and answered questions from students.
- Prof. Kemp briefly interviewed Matt Lamsey who was one of the original five Stretch with Stretch team members.
- Assignments
- Read the syllabus
- Review and practice Python 3
- Official Python 3 tutorial
- Python 3 cheat sheet
Class 2 – Guest Lecture by Dr. Vy Nguyen & Preparing to Form Teams
- Dr. Nguyen gave an excellent guest lecture. [Google Slides][PDF]
- She is an occupational therapist (OT) with deep insights into assistive robotics who has led unprecedented explorations of assistive robots at home in collaboration with Henry & Jane Evans.
- OTs are important stakeholders for caregiving robots with invaluable expertise.
- We discussed team formation.
- There will be three teams with a mix of skills, backgrounds, and educational levels.
- The class discussed the new self and peer feedback forms to set expectations.
- Members of the class briefly introduced themselves.
- The class discussed the draft teaming form that Prof. Kemp prepared and made suggestions for new questions and considerations.
- Assignments
- Fill out the online Microsoft Forms version of the teaming information form by the evening of Friday, January 13.
- Continue to review and practice Python 3
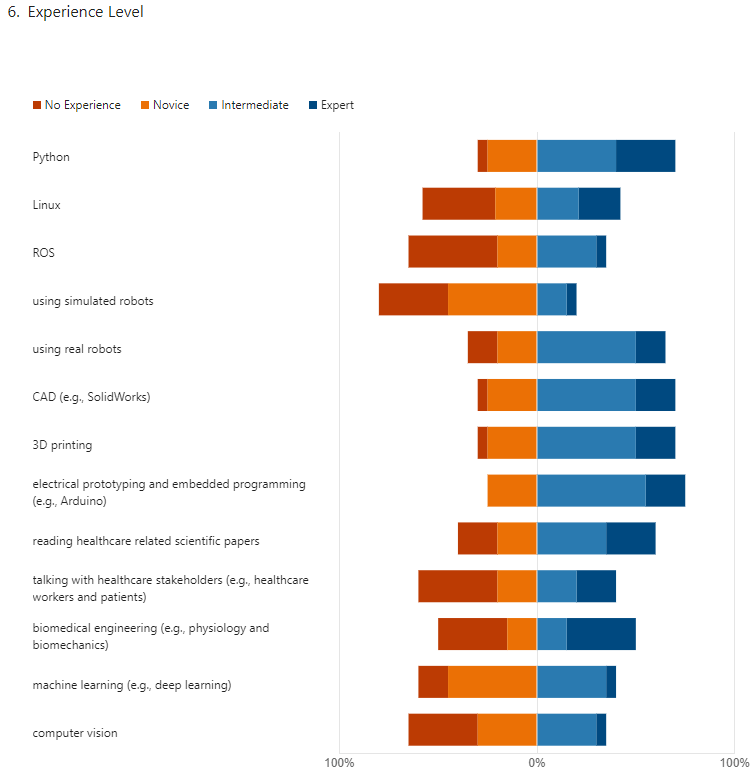
Statistics of Responses to the Teaming Information Form


Class 3 – Team Formation & Robot Safety
- “Begin with the end in mind.” – Stephen R. Covey
- Team Formation
- Students sat with their teams as described on Canvas: Red, Green, and Blue
- Prof. Kemp created the teams based on the responses students provided about their degree programs and skills (see above).
- Each team
- used the icebreaker questions to start getting to know one another
- shared something interesting they learned with the entire class
- read and discussed the problem statement
- participated in a question and answer session about the problem statement, which brought up topics like the following
- Q: Will money be available to support the team’s project? A: Prof. Kemp will seek funds if a team makes a compelling proposal.
- Q: What is the role of a mentor? A: Mentors are people who have expressed an interest in providing advice. Please be respectful of their time. Your team is not required to have a mentor. The project is the team’s project, not the mentor’s. Contributions made by the mentor should be acknowledged.
- Q: What if a project doesn’t succeed? A: The team members can still make As. These are exploratory research projects, and teams should not be overly risk averse. A negative result pursued well can be a good outcome.
- Q: Are projects required to use the robot’s arm? A: No, but novelty is important. Projects should not be reinventing something that already exists in the world. Using the arm can help with novelty, since mobile manipulators are still relatively rare.
- Q: Can a project focus on helping caregivers? A: As long as the team can convince experts that their project can benefit older adults, their project can meet the criteria specified in the problem statement. For example, this will directly impact the “value to the population” component of the project results rubric.
- Q: Can a project focus on helping healthy older adults? A: Yes, this would directly address the problem statement. In addition, compelling robotic assistance for healthy older adults might promote earlier adoption of the technology. If a user experiences a decline in health and needs more assistance, they would be better prepared to benefit from the technology.
- began discussing project ideas and interests
- discussed the list of potential mentors that Prof. Kemp posted to Canvas
- Note: The midterm proposal presentations will be in class on Monday, February 6. So, teams have about two and a half weeks to prepare a proposal that meets the criteria.
- Robot Safety
- Three new Stretch 2 robots should arrive this week.
- During class on Monday, January 23, each team will unbox its robot and begin working with it.
- Safety is paramount, so Prof. Kemp emphasized parts of the Stretch 2 Safety Manual.
- Assignments
- IMPORTANT: Read the Stretch 2 Safety Manual again on your own. It’s important to understand. If you have any questions, please ask.
- Fill out the room access form, so that you can enter the classroom outside of class and use your team’s robot.
Class 4 – Robot Unboxing & Teleoperation
- Each team followed the Stretch RE2 Quick Start Guide to begin learning about their robots, which included the following steps.
- Robot Unboxing
- Each team unboxed its robot for the term.
- Teams familiarized themselves with how to properly use and maintain the robot.
- Prof. Kemp emphasized parts of the process, such as being careful removing the head cage and keeping the robot plugged in to avoid discharging the battery.
- Teleoperation
- Teleoperation provides a powerful way to learn about the capabilities of a robot and quickly assess the feasibility of an application.
- Each team member spent time teleoperating their team’s robot.
- Teams continued their discussions about potential projects informed by the real robot.
- Storing the Robots
- Teams spent the last 15 minutes of class storing their robots, accessories, monitors, and other materials.
- Teams made sure to have their robots charging.
- Slides with additional Information
- General advice on working with the robot (slide 1)
- Official email sent by Hello Robot to customers (slide 2)
Class 5 – A Hands-on Robot Tour & Topic Discussions
- Teams continued to learn about their robots and began discussing their project ideas with Prof. Kemp.
- At the start of class, teams brought out and booted up their robots, which took longer than expected. In the future, teams will start this process as soon as members arrive.
- After the teams were ready with their robots, Prof. Kemp gave a brief tour of the robot.
- Short video from ICRA 2022 about the robot’s design
- ICRA 2022 paper about the design of Stretch
- Prof. Kemp borrowed a team’s robot running the game controller teleoperation code and pointed out various attributes.
- Prof. Kemp evenly divided the rest of the class to talk with each team about their project ideas. He talked with teams for about 30 minutes in total (~10 minutes per team).
- While Prof. Kemp talked with one team, the other two teams discussed project ideas.
- Assignments for Next Week
- Project Ideas by Class on Monday, 1/30
- Decide on no more than three candidate topics for your team’s project and be ready to discuss them with Prof. Kemp.
- Robot Tutorials by Friday, 2/3
- Complete the Stretch RE2 Quick Start Guide, including writing Python code to move the robot using iPython and the Stretch Body Robot API.
- Begin using ROS 1 with Stretch by running keyboard teleoperation.
- Visualize the robot by going through the RViz tutorial for Stretch.
- Visualize the laser range finder output via LaserScan.
- Visualize the 3D camera (D435i) output via PointCloud2.
- Visualize the robot’s frames of reference via TF.
- Look at the joint states of Stretch by going through this tutorial.
- Look at the other Stretch ROS tutorials that are available and consider going through some of them in the future.
- Project Ideas by Class on Monday, 1/30
Class 6 – Proposal Discussions
- Proposal presentations are only a week away.
- The teams started the class by working on the robot tutorials assignment. Prof. Kemp clarified that there will not be an assessment specific to the assignment. However, it is important for each team member to work through the assignment so that they can contribute to technical development, which will be reflected in the team, peer, and self assessments.
- Prof. Kemp talked with each team about their top three topics. He used the rubric for new project proposals to help guide the discussion.
- He talked with teams about related work, novelty, potential value to the population, people to contact, and technical feasibility.
- A few proposed topics were related to existing systems or seemed better approached via alternative technologies.
- He emphasized that these are exploratory projects that will be evaluated at a systems level. Each team should have developed a proof-of-concept system by the time they present their midterm results.
- He recommended planning for multiple system iterations with feedback from stakeholders. To do so, it is important to carefully scope the project and not try to solve everything. Early prototypes can approximate capabilities, such as using teleoperation to stand in for autonomy.
Class 7 – Proposal Presentation Preparations
- This was the last class prior to proposal presentations.
- Prior to class, teams finalized which project they planned to propose.
- Prof. Kemp briefly talked with the entire class about the presentation day.
- Each team will have up to 10 minutes to give their presentation.
- Each presentation will be followed by a 10 minute Q&A session.
- People with expertise will be in attendance and will have priority for the Q&A session.
- In the following class, class members will discuss their projects with one another.
- The rubric for new project proposals will be used to evaluate the team presentations.
- Later in the week, team members will use a rubric for self and peer feedback to evaluate themselves.
- Prof. Kemp recommends that teams explicitly address the criteria in the rubric for new project proposals, such as having a slide devoted to each key element of the rubric.
- Examples of projects and results presentations from previous terms can be found via links at the top of this webpage.
- Prof. Kemp spent the rest of the class talking with each of the teams about their projects. He also answered questions about the rubric for new project proposals.
Class 8 – Proposal Presentations for the Midterm Project
The hour and fifteen minute class was devoted to proposal presentations. Each team had 10 minutes to present and 10 minutes for a question and answer (Q&A) session with a panel of experts.

Prof. Maru Cabrera, Henry Evans, and Prof. Lucas McKay served on the expert panel. They provided excellent advice to the teams during the Q&A sessions. The class was very fortunate to have them in attendance.
The expert panel joined the class via Zoom. Each team presented their slides to the Zoom meeting. During the Q&A session, teams interacted with the panel via another laptop in the center of the room with a wide angle camera and a sound bar. The Q&A laptop had its microphone and speaker off during presentations to avoid audio feedback, and the teams did the same with their presentation laptops during the Q&A sessions.
Prof. Kemp, Patrick Grady, Matt Lamsey, and Jeremy Collins evaluated the proposals using Microsoft Forms for the rubric for new project proposals. Patrick, Matt, and Jeremy are graduate students conducting research in the Healthcare Robotics Lab at Georgia Tech. Patrick provided reviews the previous time Prof. Kemp taught this course. Matt and Jeremy took the course and were on separate teams, so they have a good sense for what it takes to succeed.
All the teams did well. Their projects are off to a good start!
Class 9 – Class Discussion about Midterm Projects
The Q&A sessions for the team proposals focused on questions from the expert panel. This class focused on class discussions about the projects, including questions from other class members.
- For the first 20 minutes or so, each team read and discussed the feedback they received from the reviewers.
- Then, Prof. Kemp emphasized the importance of focusing their projects and closing the loop early by creating a sketch of the entire functional system. Any specific part of their projects could be explored indefinitely, so it’s important to keep a system perspective and allocate resources accordingly. Similarly, working with real stakeholders early can reveal surprising opportunities to help in novel ways.
- For the last 45 minutes, each team answered questions from the other teams’ members and Prof. Kemp provided additional feedback. Each team had around 15 minutes to answer questions and discuss their plans.
Assignments
- Students must submit their self and peer feedback via Microsoft Forms by the night of Monday, February 13.
- The results presentations will occur in 3.5 weeks. To help teams focus, each team is supposed to come up with a plan for a minimal system implementation to discuss with Prof. Kemp by class on Monday, February 13.
Class 10 – In-class Work on Midterm Projects
The teams spent the class working with their robots.
- Teams worked through tutorials relevant to their projects to better understand how to use the robot and how they might build on existing code.
- Fewer students per robot would be better when working through the tutorials, since one to three students appeared to be most engaged with the tutorials with others more passively observing.
- Prof. Kemp advised students that when working with complex systems like robots, it’s best to start with a working system and iterate, rather than starting from scratch with a non-functional system.
- Teams also discussed how they could get more feedback earlier, such as by using game controller teleoperation to demonstrate ideas to stakeholders and elicit richer feedback.
Class 11 – In-class Work & Votes on Class Changes
- All of the students have submitted their self and peer feedback forms. There are 134 submissions in total corresponding with the two teams with seven members and one team with six member (49 + 49 + 36 = 134).
- Due to the time required for students to fill out the forms and for Prof. Kemp to process them, Prof. Kemp proposed that the class drop the final proposal self and peer feedback. This will result in a total of three self and peer feedback assessments: one for the midterm project proposal, one for the midterm project results, and one for the final project results. This also makes sense, since the final project proposal process is short. The students unanimously voted in favor of this change.
- Prof. Kemp also proposed that all of the remaining class periods before the midterm results presentations be devoted to teams working on their projects rather than lectures. The students unanimously voted in favor of this plan.
- One student also expressed interest in a session to help students use the robot for navigation.
Class 12 – Advice on Stakeholder Interactions

- Students attended the class in person to work with their teams on their projects.
- Prof. Kemp participated remotely via Zoom to provide on-demand consulting.
- During one discussion via Zoom, Prof. Kemp provided the following advice about stakeholder interactions.
- Prof. Kemp encouraged teams to provide a live demo of their robot in-person or via video conference to ground their discussions with stakeholders. By presenting a concrete representation of the robot being used by the team, stakeholders will be more likely to provide relevant ideas and feedback.
- Stakeholders without robotics expertise will tend to think in terms of humanlike capabilities, as portrayed in science fiction, or robots they’ve worked with, like the Roomba.
- Stakeholders with robotics expertise will tend to think in terms of the robots they’ve worked with and may not have experience with the robot the team is using.
- Prof. Kemp emphasized that making use of stakeholder feedback can be a challenging process involving skills that take time to learn.
- An important goal is to find an intersection between two sets, which can be visualized as a Venn diagram (see figure above). One set consists of the set of systems that the stakeholder would appreciate. The other set consists of the set of systems that are technically feasible. Typically, stakeholders are experts for one set and the technical team members are experts for the other set. Finding an intersection between these two sets is usually an iterative process that involves listening, asking questions, and exploring possibilities.
- Rather than taking feedback at face value, it’s important for the technical team to better understand feedback from stakeholders. Sometimes a seemingly small technical change can result in a large change in stakeholder perceptions. Similarly, a large technical change may not change stakeholder perceptions, or could even result in poorer perceptions.
- Teams should be careful about the possibility of receiving overly positive feedback from stakeholders due to the stakeholders not wanting to discourage the team or hurt the team’s feelings.
- In general, stakeholders don’t care about the technical effort involved, they care about whether the system will help them.
- Prof. Kemp also described a psychological reason to seek early advice from stakeholders.
- People tend to value something more highly if they’ve worked hard on it, regardless of its true value. This is an example of the sunk cost fallacy.
- In general, the amount of work a team has invested in a system is irrelevant to how much a stakeholder values the system.
- Getting stakeholder feedback early makes it easier for a team to change their approach, since they will have invested less in the system. Getting stakeholder feedback later can make it more painful to receive negative feedback, and more difficult to benefit from the feedback.
- Prof. Kemp encouraged teams to provide a live demo of their robot in-person or via video conference to ground their discussions with stakeholders. By presenting a concrete representation of the robot being used by the team, stakeholders will be more likely to provide relevant ideas and feedback.
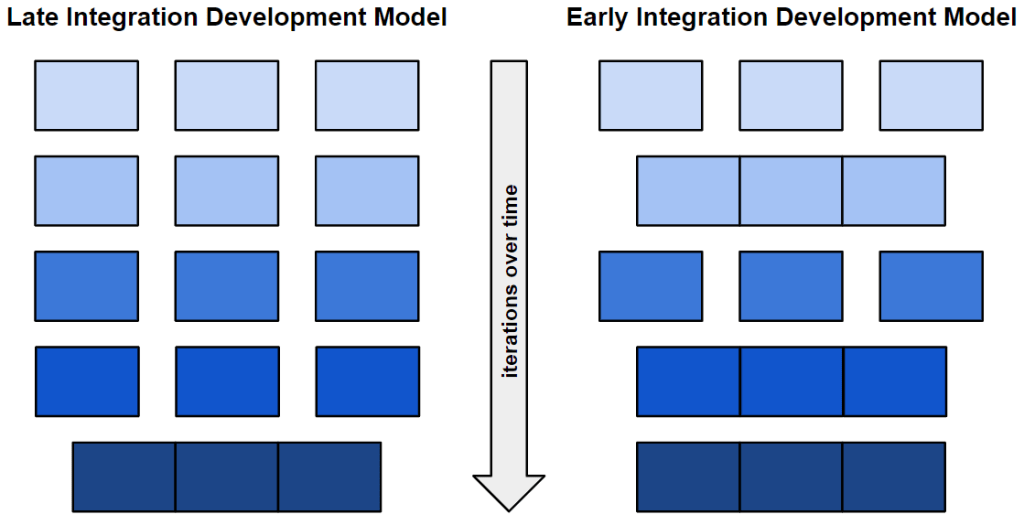
Class 13 – Early vs. Late Integration of Components
- The teams were very active throughout the class working on their projects.
- Prior to the class, Prof. Kemp emailed the results of self and peer feedback to each student.
- Providing the feedback earlier would have been more helpful. In the future, he plans to request that students fill out the feedback form earlier. He will also attempt to process the data more quickly, so that team members have more time to benefit.
- Prof. Kemp recommended that individuals and teams devote time to reading the feedback and discussing it as a group, such as by having each team member discuss the feedback they received from the group with the group.
- Students consulted with Prof. Kemp, and Prof. Kemp cycled around the teams. Topics included the following.
- The benefits of integrating components earlier (see figure above) was a consistent theme. Prof. Kemp emphasized that integrating early and often is valuable, and that a common form of failure is to pursue parallel development paths for components, attempt to put the components together at the last minute, and then find that the components do not work together or lead to a system poorly matched to the original project goals.
- Why is it a good idea to retract the arm and rotate the gripper into the footprint of the mobile base prior to navigation?
- Navigating with the arm and wrist extended increases the likelihood of collisions, reducing safety and limiting the locations to which the robot can drive.
- Bumping into things could also result in the gripper dropping an object or pushing an object off of a surface.
- Having the arm and wrist extended can also increase vibrations at the gripper, which can loosen its grip on an object.
- How can the robot estimate its pose when navigating?
- This is a large topic, but typical approaches use multiple sensors to estimate a task-relevant pose of the robot, such as the robot’s pose with respect to a map, a person, or an object. For example, robots can use wheel odometry, inertial measurement units (IMUs), cameras, and laser range finders.
- Methods often combine estimates of how the robot’s pose has changed, such as via wheel odometry, with direct estimates of the robot’s pose, such as by using a camera to estimate the robot’s pose relative to a task-relevant object.
- Some navigation tasks can be accomplished without using an explicit pose estimate. Models of bee navigation provide an excellent example of an alternative approach.
- What are differences among publish/subscribe, service calls, and actions servers in ROS 1?
- How can the robot switch between navigation, manipulation, and other activities, such as by using finite state machines (FSMs) with SMACH?
Class 14 – Preparing to Present in One Week
- Prof. Kemp spent the class talking with team members to discuss their plans for their midterm results presentations in one week.
- The midterm results presentations will be conducted in a similar way to the proposal presentations.
- Each team will have up to 10 minutes to give their presentation.
- Each presentation will be followed by a 10 minute Q&A session.
- People with expertise will be in attendance and will have priority for the Q&A session.
- In the following class, class members will discuss their projects with one another.
- The rubric for project results will be used to evaluate the team presentations.
- Later in the week, team members will use a rubric for self and peer feedback to evaluate themselves.
- Prof. Kemp recommends that teams explicitly address the criteria in the rubric for project results, such as having a slide devoted to each key element of the rubric.
- Examples of projects and results presentations from previous terms can be found via links at the top of this webpage.
Class 15 – Last Class Before Midterm Results Presentations
- Students were very focused on their preparations for their presentations. They were primarily still working on their implementations.
- Prof. Kemp mostly attempted to stay out of the way. He circulated among the teams to ask if they had seen the rubric, how things were going, and if they had any questions.
Class 16 – Midterm Results Presentations
The hour and fifteen minute class was devoted to midterm results presentations. Each team had 10 minutes to present and 10 minutes for a question and answer (Q&A) session with a panel of experts.

Prof. Zackory Erickson, Prof. Maru Cabrera, and Henry Evans served on the expert panel. They provided excellent advice to the teams during the Q&A sessions. The class was very fortunate to have them in attendance. Prof. Maru Cabrera and Henry Evans attended via Zoom. Prof. Zackory Erickson participated in person all the way from Pittsburgh, PA!

Prof. Kemp, Matt Lamsey, and Jeremy Collins evaluated the proposals using Microsoft Forms for the rubric for project results. Matt and Jeremy are graduate students conducting research in the Healthcare Robotics Lab at Georgia Tech. They took the course in the fall of 2021.
All the teams did an excellent job! It was impressive to see how far they had come since their proposals. One team even braved a live demo, which was excellent!
Class 17 – Class Discussion about Midterm Results
The Q&A sessions for the team proposals focused on questions from the expert panel. This class focused on class discussions about the projects, including questions from other class members, with a focus on the final proposal.
- For the first 20 minutes, each team read and discussed the feedback they received from the reviewers.
- Prof. Kemp then talked about planning for the final project proposal and final project results, which will be evaluated using the rubric for continuing project proposals and the rubric for project results.
- Prof. Kemp recommended three goals.
- Identify and focus on the aspects of the project that make it distinctive.
- Have at least one person from the target population try out the system.
- Create a video that the team would be proud to share with the world.
- For the last 45 minutes, each team answered questions from the other teams’ members, and Prof. Kemp provided additional feedback. Each team had around 15 minutes to answer questions and discuss their plans.
Assignment
- Students must submit their self and peer feedback via Microsoft Forms by Monday, March 13.
Class 18 – Planning for Positive Impact
Prof. Kemp started the class by reemphasizing the following three goals he recommended in the prior class. He also quickly reviewed the rubric for continuing project proposals.
- Identify and focus on the aspects of the project that make it distinctive.
- Have at least one person from the target population try out the system.
- Create a video that the team would be proud to share with the world.
Prof. Kemp spent the rest of the class with each of the three teams. He discussed their plans, which entailed detailed discussions about each individual project. He recommended concretely imagining and planning for two types of success.
- What could they do that would result in stakeholders being honestly excited about the future of the system? Imagine if an end user or healthcare specialist said something like, “I want this! When can I get one?” after trying it out.
- What would they like their project video to show to the world? What would make them proud and excited to show the video to others?
Class 19 – Final Proposal Presentations
The class was devoted to final proposal presentations. Each team had 10 minutes to present and up to 10 minutes for a question and answer (Q&A) session with reviewers and the rest of the class. For these presentations, there was no expert panel and no one participated remotely. The focus was on helping teams make their plans for the rest of the term.
Prof. Kemp, Matt Lamsey, and Jeremy Collins evaluated the proposals using Microsoft Forms for the rubric for continuing project proposals. Matt and Jeremy are graduate students conducting research in the Healthcare Robotics Lab at Georgia Tech who took the course in the fall of 2021.
The teams have exciting plans! Advice for the teams included the following points.
- Use a version control system, such as GitHub, and videos to ensure that your team has reportable results even if something goes wrong, such as an unrecoverable hardware issue. The teams are working with complex robotic systems that can fail in many ways, especially when pushing hard for a deadline.
- Similarly, use a version control system to save versions with documentation to make sure that your team can revert to a prior functional version in case errors emerge for unknown reasons. With complex systems, errors that are difficult to debug can be subtly introduced.
- Plan to integrate and test components early and repeatedly. As discussed in a previous class, late integration often leads to issues.
- Plan to interact with stakeholders more than once before the end of your project. This will increase the likelihood of creating a system they appreciate.
Class 20 – Modification to Self/Peer Feedback
Last week was spring break. Teams resumed worked on their final projects.
Prof. Kemp discussed self and peer feedback, which is a new part of the class that Prof. Kemp introduced to address feedback he received from students the previous time he taught the class in fall 2021.
First, he asked the class whether it was worthwhile. After a discussion, he had class members raise their hands in favor or in opposition to the current process. Only three people were opposed and the rest were in favor of continuing to use the current self/peer feedback process.
Then, Prof. Kemp asked how he can encourage timely submission, since several students were late in submitting their feedback, which delays students benefitting from the feedback and grading. Prof. Kemp was particularly concerned about the end of the term, since grades are due shortly after the class ends.
Students suggested calculating the self/peer feedback grades based on the feedback that has been submitted in a timely manner. Prof. Kemp and the class then came up with the idea for Prof. Kemp to submit his feedback for an individual in place of their “self” feedback if they haven’t submitted all their feedback in time. Prof. Kemp would incorporate this tardiness in his assessment thereby serving as additional incentive for timely submission.
Class 21 – Video Guidelines
In this class, teams worked on their final projects. Prof. Kemp started by reviewing the time remaining prior to the video feedback and final presentation classes. He described the intentions of the video feedback class, which follow.
- Each team should bring a first draft of their project video to class.
- Teams will present their project videos after which the class will give feedback to help them create compelling videos ready to share with the world.
- Prof. Kemp provided a few video guidelines, but plans to present guidelines in more depth in a future class.
- Videos should be as short as possible while conveying critical content. Ideally, they should be less than a minute and a half in length to facilitate dissemination online and through social media.
- Videos of robots should be clearly annotated in terms of any speed up, teleoperation, or autonomy, since viewers often overestimate performance.
- The video should include motivation, technical content, stakeholder emphasis, and video of the robotic system in operation.
- Teams should strive to have all team members visible, since credit is often biased towards people who are visible.
- Prof. Kemp recommended viewing the team videos found near the top of the website for the fall 2021 Robotic Caregivers class to get ideas for their videos.
Prof. Kemp then led a discussion about whether students would want any in-class lectures or would rather devote remaining class time to their projects. Students tended to be more interested in using class time for their projects, but a few students were interested in lectures. Prof. Kemp committed to consider creating a short lecture on entrepreneurship.
Class 22 – Commercialization
Links to Commercialization Slides: [PDF] [Google Slides]
Based on the discussion in the previous class, Prof. Kemp gave a lightning talk on commercialization. The goal was to provide insights while avoiding taking time away from final project efforts. The talk took 9 minutes, but the question and answer session lasted significantly longer.
Class 23 – Making Robot Videos
Links to Making Robot Videos Slides: [PDF] [Google Slides]
Prof. Kemp gave a second lightning talk on making robot videos. The talk and discussion took less than 10 minutes.
Class 24 – Robots in Homes
Links to Robots in Homes Slides: [PDF] [Google Slides]
Prof. Kemp gave a third lightning talk on the potential for future robots to be in homes. The talk took about 10 minutes and 40 seconds. Students chose not to have a discussion afterwards, since they wanted to focus on their final projects.
Class 25 – Ask Me Anything
Prof. Kemp did a 10 minute ask-me-anything (AMA) session at the beginning of the class.
Class 26 – Last Class for Project Work
This was the last class devoted to project work. Prof. Kemp talked with each of the teams about their plans and answered questions about their final project videos and presentations.
Class 27 – Draft Video Viewing Session
Teams showed drafts of their final videos and got feedback from the class. The discussions resulted in major changes to the class.
- The team’s final video will be the primary presentation, since it represents an excellent opportunity to communicate results with the public and has the potential to be professionally valuable to team members.
- Videos represent a medium of communication with great importance in contemporary society. As such, learning to communicate technical content in a professional manner via video represents an important learning outcome.
- To communicate the key aspects of their projects, videos will need to be longer than originally expected. Each team’s video may last up to 10 minutes, and can be used exclusively as the team’s final presentation, if desired.
Class 28 – Final Presentations!
The teams did a fantastic job! Their videos were compelling, and they had productive discussions with the remarkable group of experts who attended.

The experts shown above from left to right, top to bottom are
- Prof. Maru Cabrera from UMass Lowell
- Prof. Maya Cakmak from the University of Washington
- Prof. Sonia Chernova from Georgia Tech (attended in person)
- Prof. Zackory Erickson from Carnegie Mellon University
- Jerry Feldman who is a Parkinson’s Foundation Ambassador
- Prof. Naomi Fitter from Oregon State University
- Julia Gangemi from Prof. Randy Trumbower’s lab
- Prof. Lucas McKay from Emory University
- Dr. Vy Nguyen from Hello Robot
- Dr. Samuel Olatunji from the Human Factors and Aging Laboratory at the University of Illinois Urbana-Champaign
- Prof. Randy Trumbower from Spaulding Rehabilitation Hospital and Harvard Medical School
- Dr. Chris Tuthill from Prof. Randy Trumbower’s lab
Prof. Kemp, Matt Lamsey, and Jeremy Collins evaluated the final projects using a form (Microsoft Forms) for the rubric for project results. Students provided self and peer feedback using a form (Microsoft Forms) based on the self and peer feedback for project results.
You can learn about the teams’ projects at the top of this website, since all of the teams chose to share their project videos with the public.
It was a great term thanks to amazing students, mentors, stakeholders, and experts! Thank you!
Credit
As a graduate student, Prof. Zackory Erickson co-developed and co-taught the original version of this course with Prof. Kemp in spring 2020 and spring 2021. The original version focused on projects using Assistive Gym, a physics simulation environment for assistive robotics. Prof. Zackory Erickson is now a tenure-track faculty member in the Robotics Institute at CMU, where he teaches 16-887: Robotic Caregivers and Intelligent Physical Collaboration.