
There is a well-documented shortage of nurses and direct-care workers in the U.S. and around the world, which is expected to become more problematic as the older adult population grows and prepares for retirement. In a study of the effects of high patient-to-nurse ratio, Aiken et al. showed that each additional patient per nurse was associated with a 7% increase in patient mortality and a 23% increase in nurse burnout. Consequently, studies have suggested that lowering the patient-to-nurse ratio would result in less missed patient care. We believe robotics can play a role in assisting nurses to complete their daily tasks in order to provide better healthcare.
Robotic Bed Bath
A Direct Physical Interface
Demonstration of the Direct Physical Interface: Lab member Tiffany Chen leads the robot Cody by the hand
In the long run, robots may be sufficiently perceptive, agile, and intelligent to autonomously perform nursing tasks. However, healthcare facilities in general, and hospitals in particular, present daunting challenges for autonomous operation. Within these highly-cluttered environments, errors can have deadly consequences. Thus, we have developed an intuitive, direct physical interface (DPI) that enables a nurse directly control the movement of the human-scale mobile manipulator Cody. Using the DPI, a nurse is able to lead and position Cody by making direct contact with its body.
When the user grabs and moves either of the robot’s end effectors (the black rubber balls), the robot responds. Pulling forward or pushing backward makes the robot move forward or backward. Moving the end effector to the left or right causes the robot to rotate, while moving it up or down, causes the robot’s torso to move up or down. The user can also grab the robot’s arm and abduct or adduct it at the shoulder, which causes the robot to move sideways.
We evaluated this interface in the context of assisting nurses with patient lifting, which we expect to be a high-impact application area. Our evaluation consisted of a controlled laboratory experiment with 18 nurses from the Atlanta area of Georgia, USA. We found that our DPI significantly outperformed a comparable wireless gamepad interface in both objective and subjective measures, including number of collisions, time to complete the tasks, workload (Raw Task Load Index), and overall preference. In contrast, we found no significant difference between the two interfaces with respect to the users’ perceptions of personal safety.
Publications
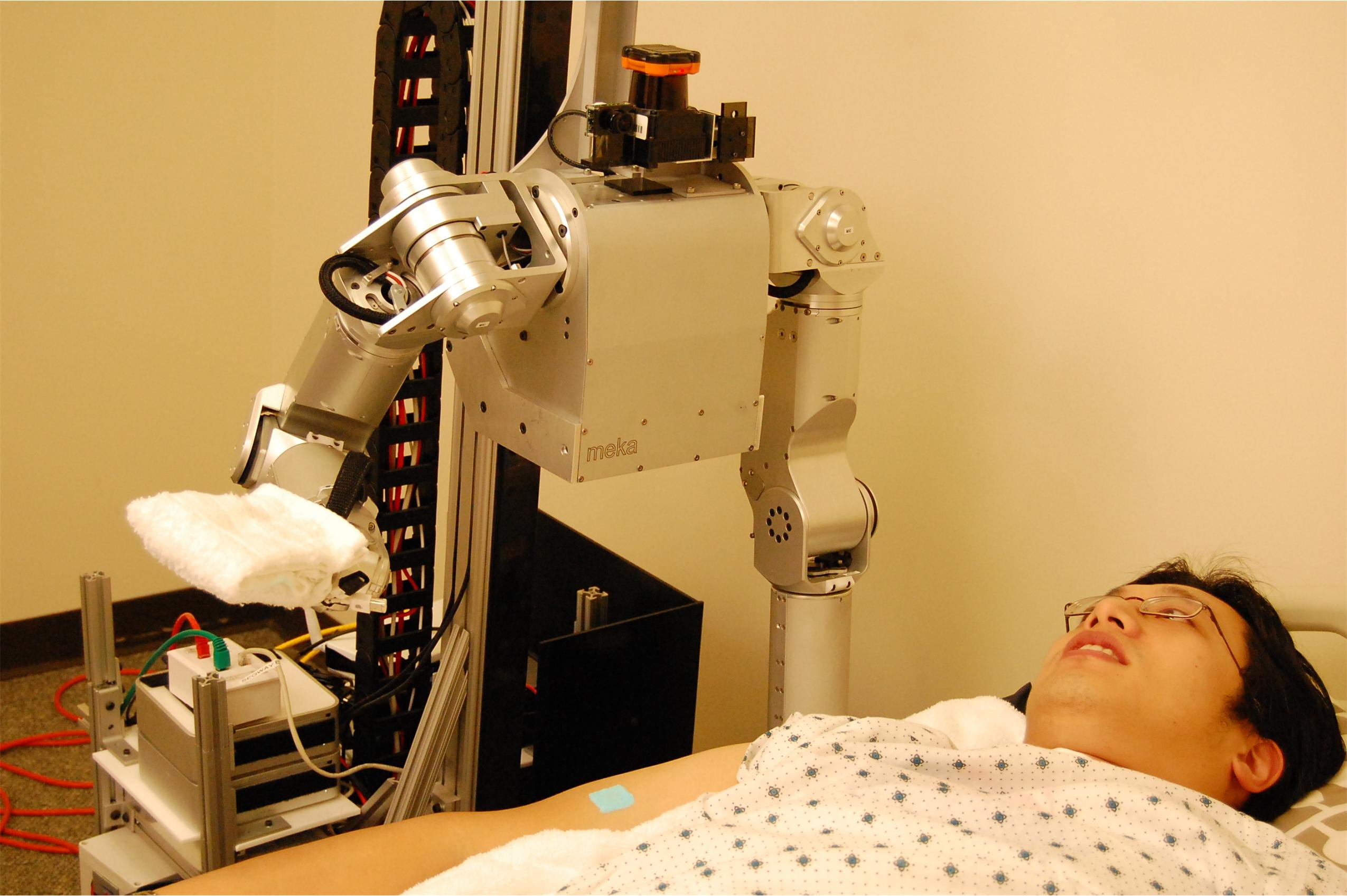
- Towards an Assistive Robot that Autonomously Performs Bed Baths for Patient Hygiene, Chih-Hung King,Tiffany L. Chen, Advait Jain, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2010
- Lead Me by the Hand: Evaluation of a Direct Physical Interface for Nursing Assistant Robots, Tiffany L. Chenand Charles C. Kemp, 5th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2010
Support
This work is generously supported by Hstar Technologies, the NSF Graduate Research Fellowship Program, Willow Garage, and NSF grant IIS-0705130.