|
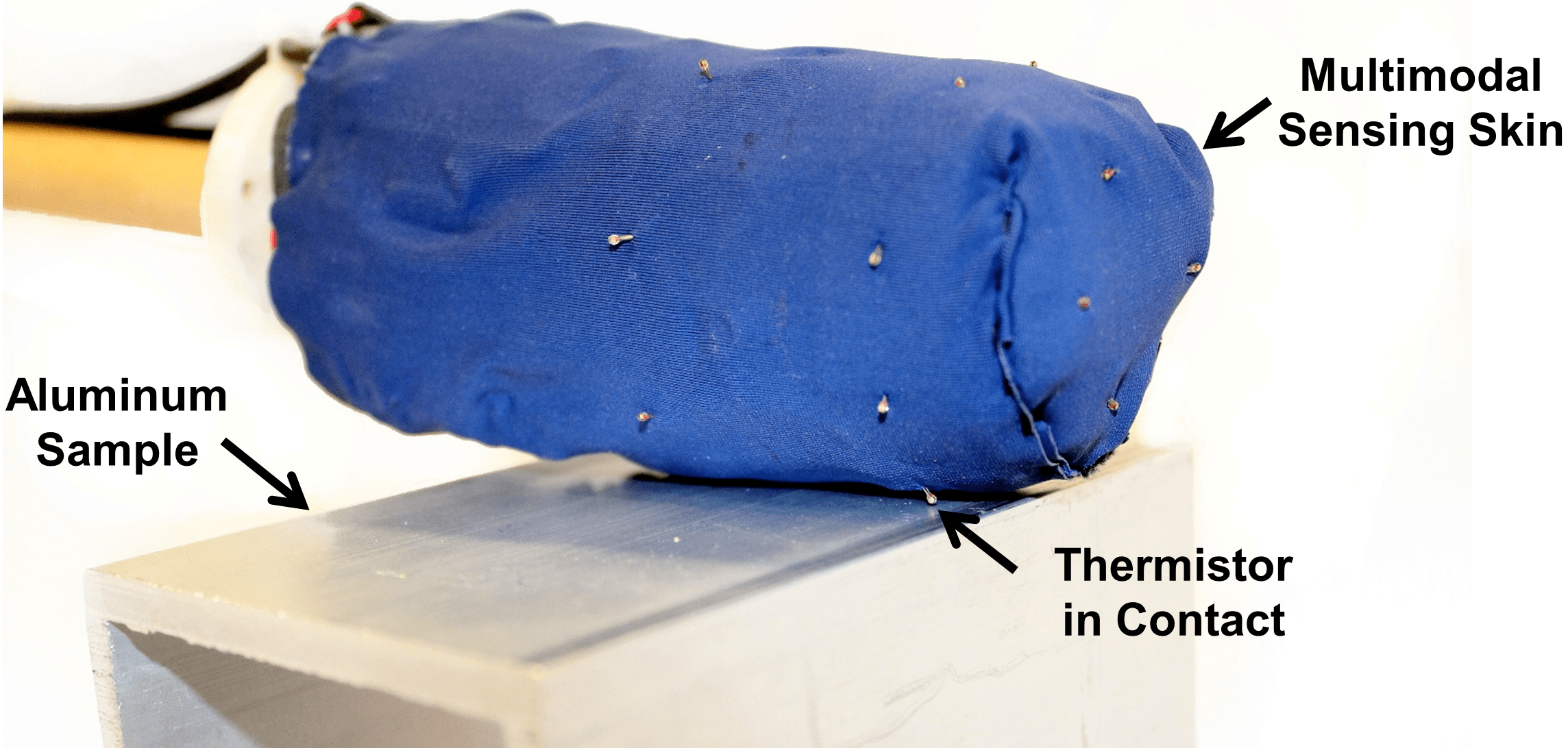
A Force and Thermal Sensing Skin for Robots in Human Environments, Joshua Wade, Tapomayukh Bhattacharjee, Ryan D. Williams, and Charles C. Kemp, Robotics and Autonomous Systems, 2017. |
 |
Older adults’ Acceptance of a Robot for Partner-Dance Based Exercise, Tiffany L. Chen, Tapomayukh Bhattacharjee, Jenay M. Beer, Lena H. Ting, Madeleine E. Hackney, Wendy A. Rogers, and Charles C. Kemp, PLoS ONE, 2017 |
 |
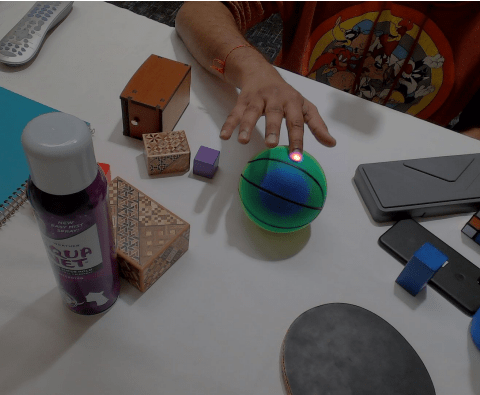
Semi-Supervised Haptic Material Recognition for Robots using Generative Adversarial Networks, Zackory Erickson, Sonia Chernova, and Charles C. Kemp, 1st Annual Conference on Robot Learning (CoRL 2017), 2017. |
 |
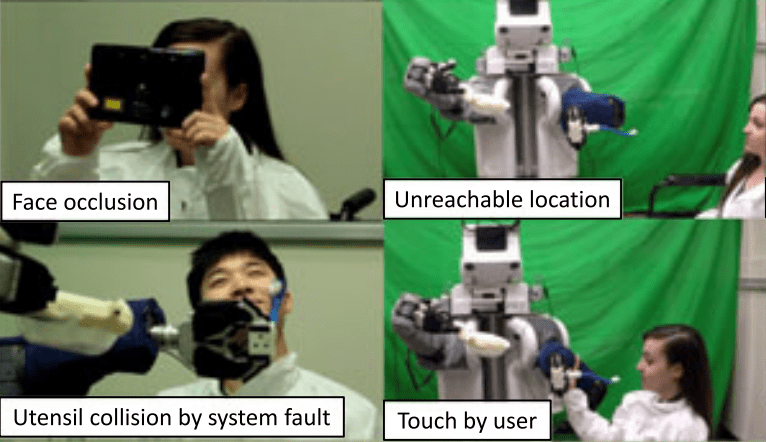
A Multimodal Execution Monitor with Anomaly Classification for Robot-Assisted Feeding, Daehyung Park, Hokeun Kim, Yuuna Hoshi, Zackory Erickson, Ariel Kapusta, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017. |
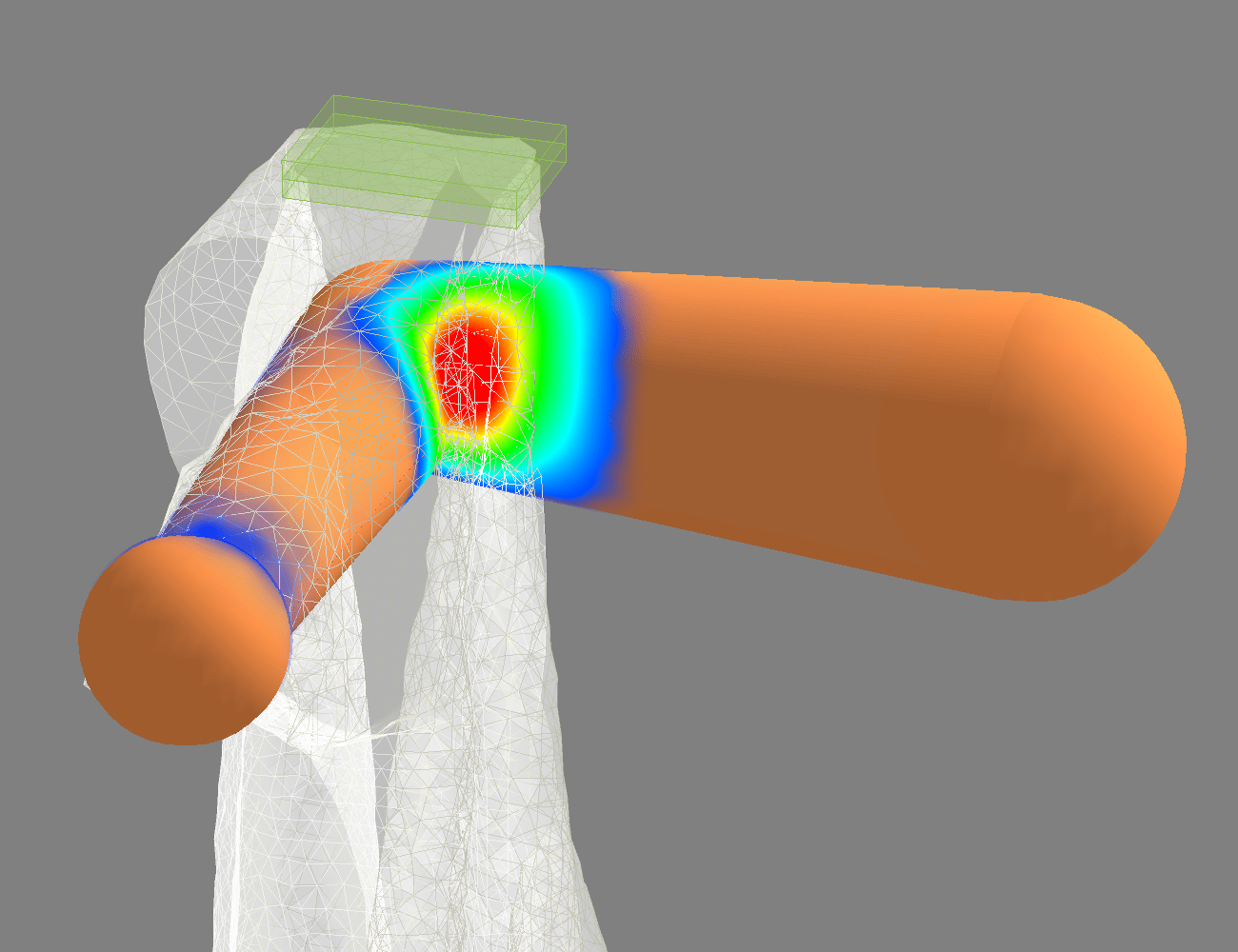 |
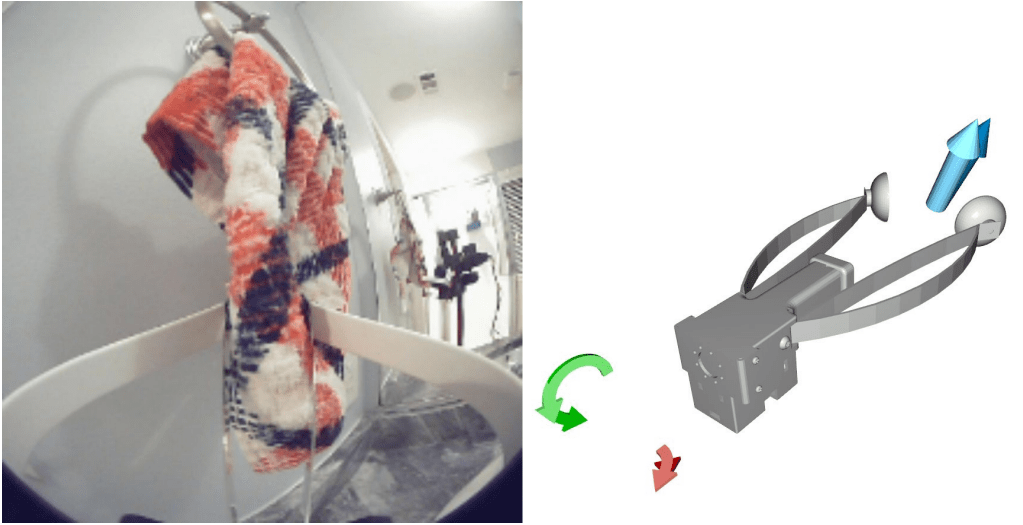
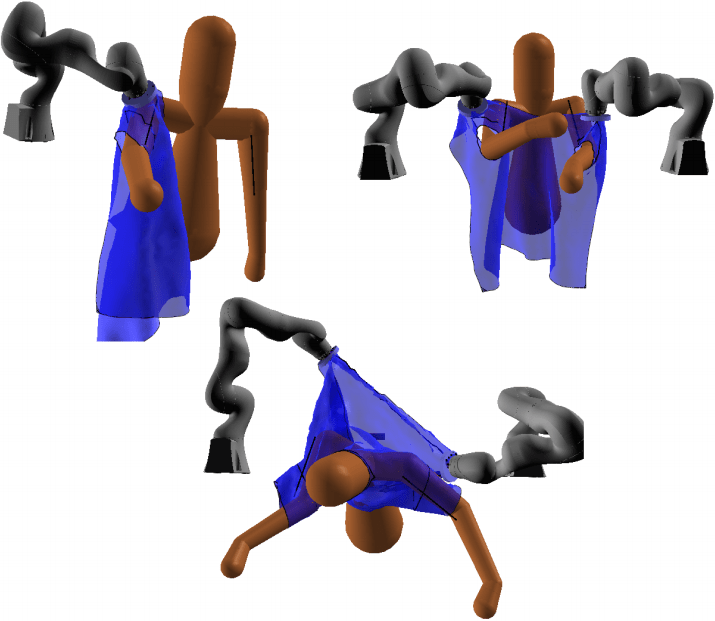
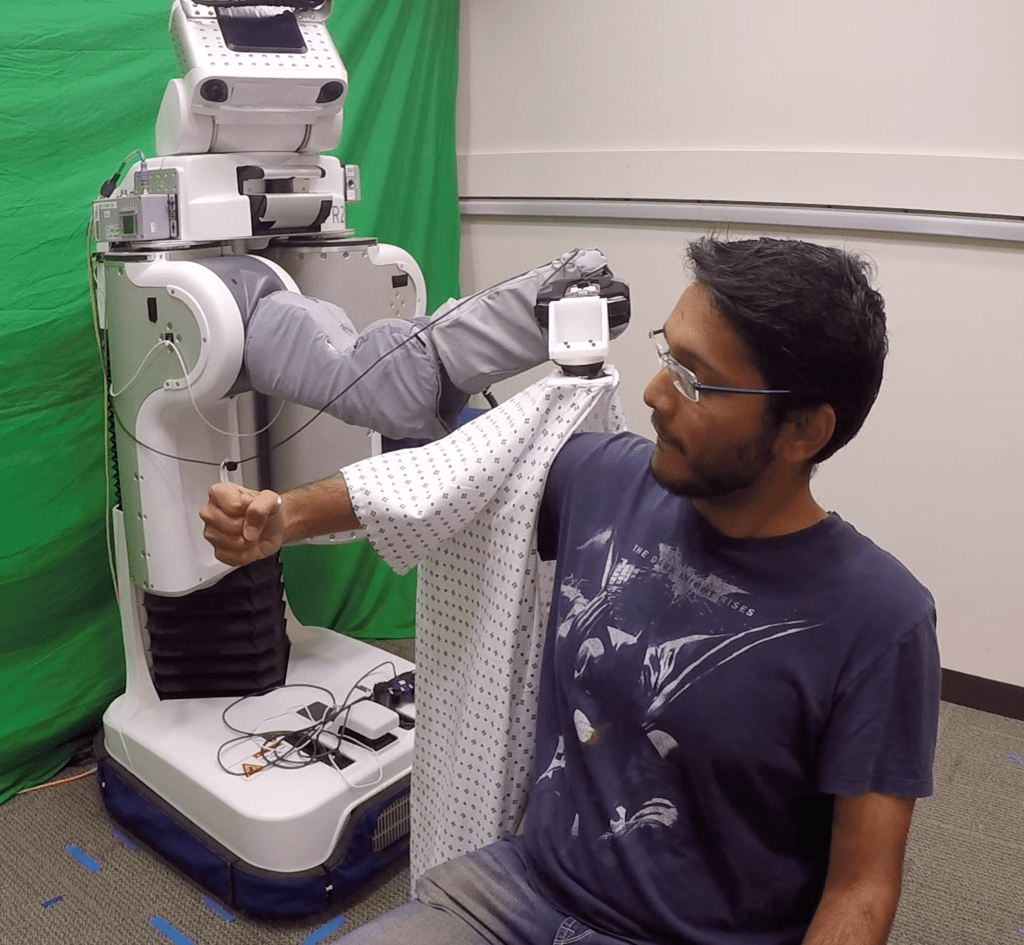
What Does the Person Feel? Learning to Infer Applied Forces During Robot-Assisted Dressing, Zackory Erickson, Alexander Clegg, Wenhao Yu, Greg Turk, C. Karen Liu, and Charles C. Kemp, IEEE International Conference on Robotics and Automation (ICRA), 2017. |
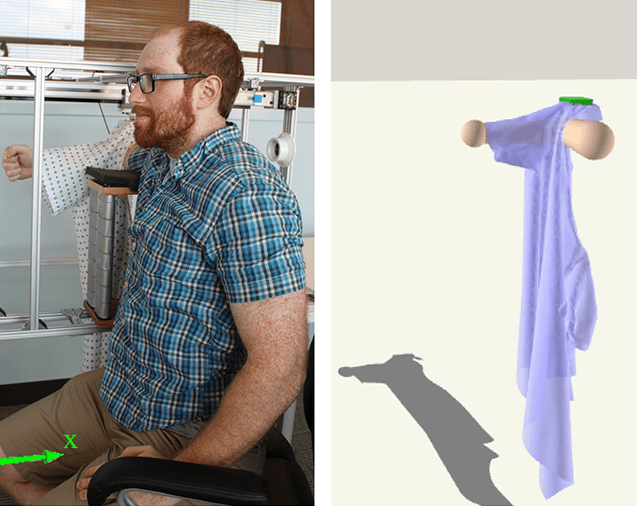 |
Haptic Simulation for Robot-Assisted Dressing, Wenhao Yu, Ariel Kapusta, Jie Tan, Charles C. Kemp, Greg Turk and C. Karen Liu, IEEE International Conference on Robotics and Automation (ICRA), 2017. |
 |
Small Forces that Differ with Prior Motor Experience can Communicate Movement Goals during Human-Human Physical Interaction, Andrew Sawers, Tapomayukh Bhattacharjee, J. Lucas. McKay, Madeleine E. Hackney, Charles C. Kemp, and Lena H. Ting, Journal Of NeuroEngineering and Rehabilitation, 2017. |
2016
|
|

|
Force and Thermal Sensing with a Fabric-based Skin, Joshua Wade, Tapomayukh Bhattacharjee, and Charles C. Kemp, IROS Workshop on See, Touch, and Hear : 2nd Workshop on Multimodal Sensor-based Robot Control for HRI and Soft Manipulation, 2016. |
 |
A CRF that Combines Touch and Vision for Haptic Mapping, Ashwin A. Shenoi, Tapomayukh Bhattacharjee, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016 |
 |
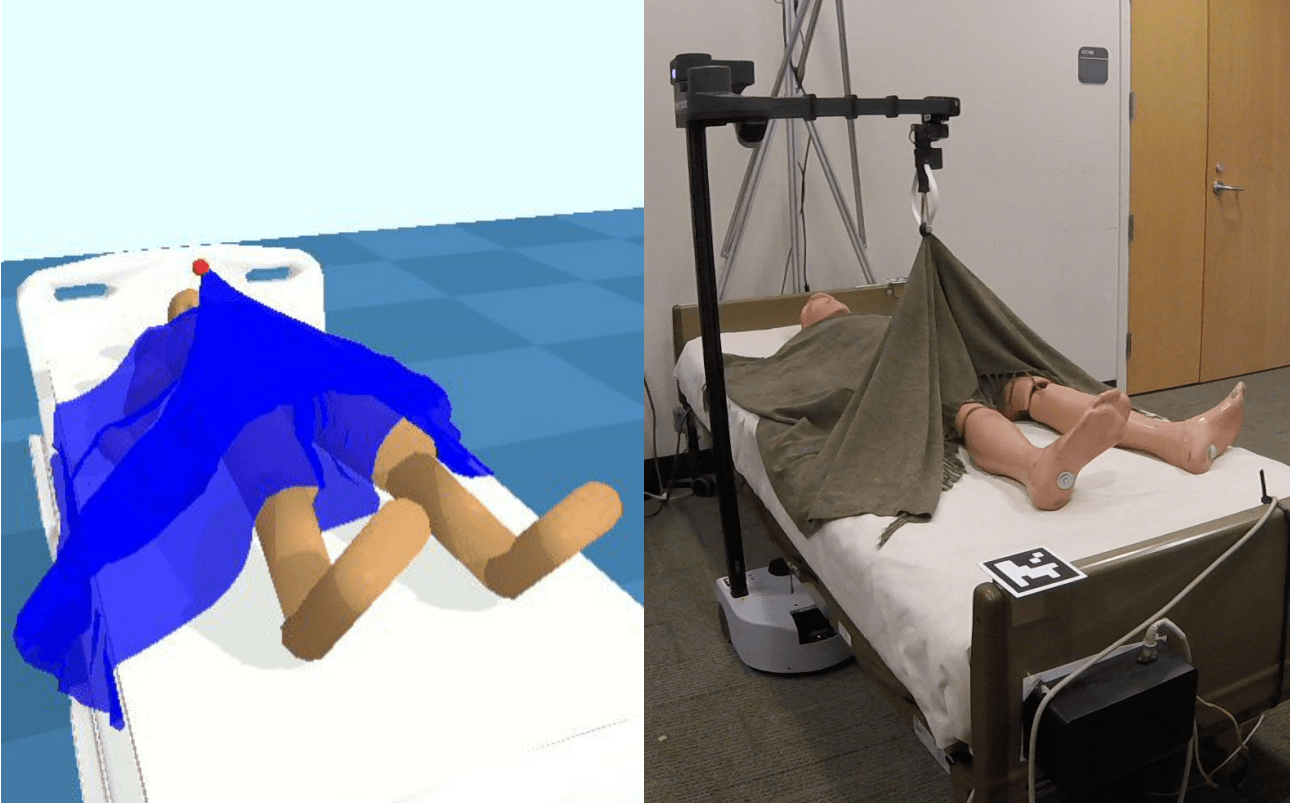
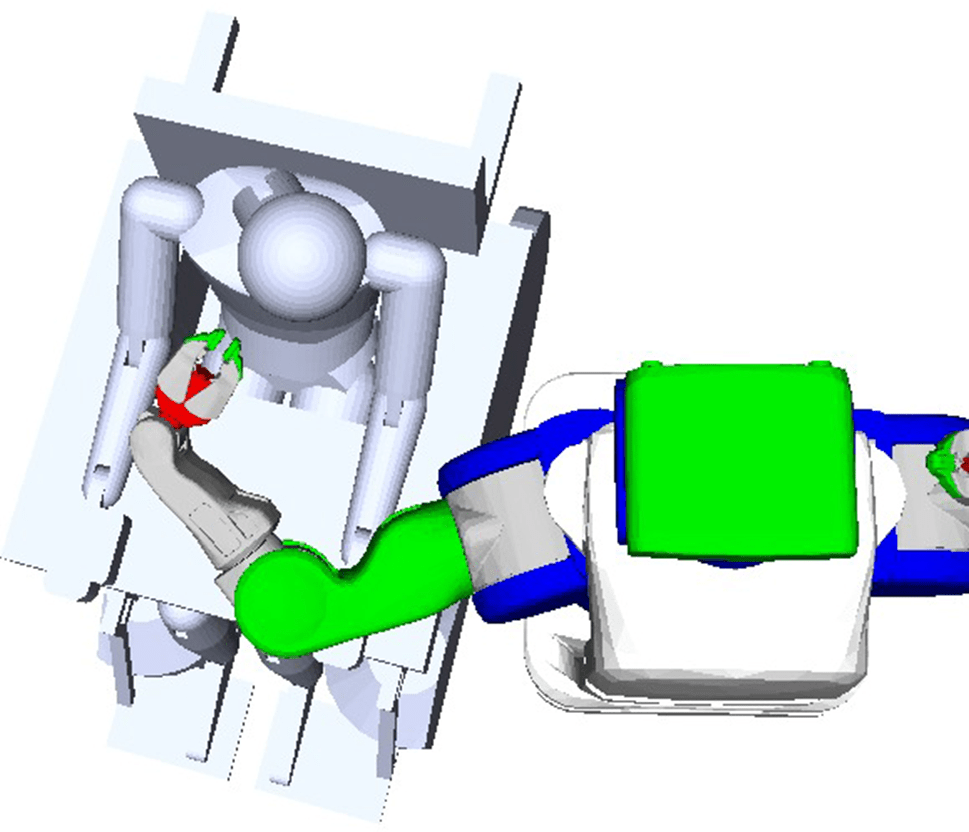
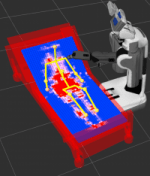
Collaboration Between a Robotic Bed and a Mobile Manipulator May Improve Physical Assistance for People with Disabilities, Ariel Kapusta, Yash Chitalia, Daehyung Park, and Charles C. Kemp, RO-MAN 2016 Workshop on behavior adaptation, interaction and learning for assistive robots (BAILAR 2016), 2016. |
 |
Data-Driven Haptic Perception for Robot-Assisted Dressing, Ariel Kapusta, Wenhao Yu, Tapomayukh Bhattacharjee, C. Karen Liu, Greg Turk, and Charles C. Kemp, IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2016. |
 |
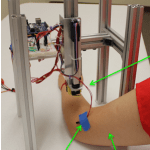
Robotic Repositioning of Human Limbs via Model Predictive Control, Kevin Chow and Charles C. Kemp, IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2016. |
 |
Autobed: Open Hardware for Accessible Web-based Control of an Electric Bed, Phillip M. Grice, Yash Chitalia, Megan Rich, Henry M. Clever, and Charles C. Kemp, 2016 Annual Conference, Rehabilitation Engineering and Assistive Technology Society of North America (RESNA), 2016. [Poster] |
 |
Assistive Mobile Manipulation: Designing for Operators with Motor Impairments, Phillip M. Grice and Charles C. Kemp, RSS 2016 Workshop on Socially and Physically Assistive Robotics for Humanity, 2016. |
 |
Optimization of Robot Configurations for Assistive Tasks, Ariel Kapusta and Charles C. Kemp, RSS 2016 Workshop on Planning for Human-Robot Interaction: Shared Autonomy and Collaborative Robotics, 2016 |
 |
Multimodal Execution Monitoring for Anomaly Detection During Robot Manipulation, Daehyung Park, Zackory Erickson, Tapomayukh Bhattacharjee, and Charles C. Kemp, IEEE International Conference on Robotics and Automation (ICRA), 2016. |
 |
Towards Assistive Feeding with a General-Purpose Mobile Manipulator, Daehyung Park, You-Keun Kim, Zackory Erickson, and Charles C. Kemp, ICRA 2016 workshop on Human-Robot Interfaces for Enhanced Physical Interactions, 2016 |
 |
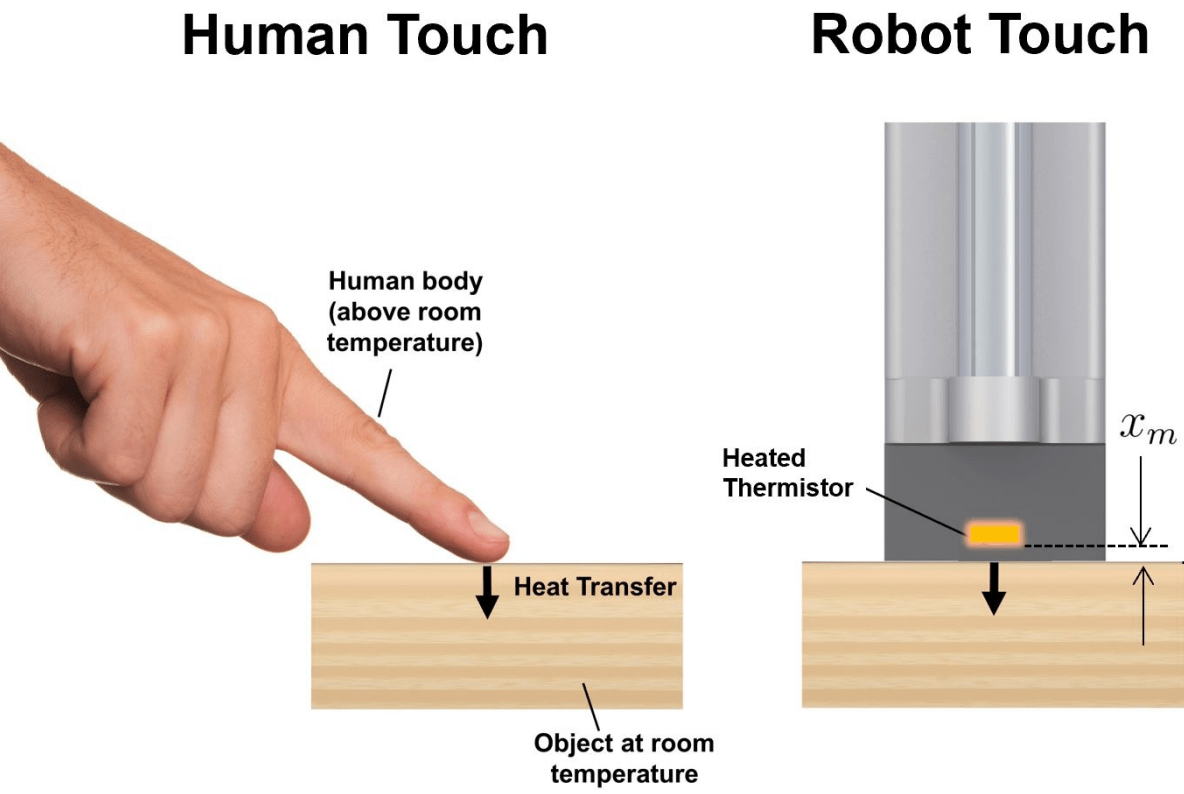
Data-Driven Thermal Recognition of Contact with People and Objects, Tapomayukh Bhattacharjee, Joshua Wade, Yash Chitalia, and Charles C. Kemp, IEEE Haptics Symposium, 2016 |
2015
|
|
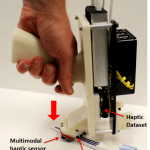 |
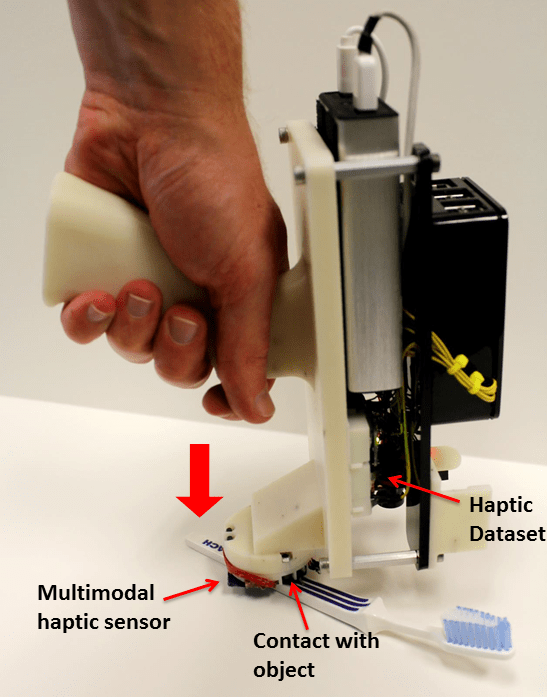
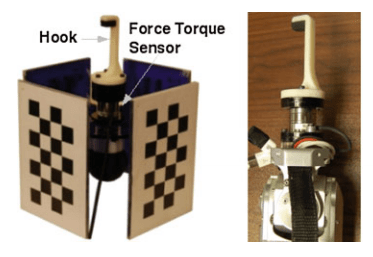
A Handheld Device for the In Situ Acquisition of Multimodal Tactile Sensing Data, Joshua Wade, Tapomayukh Bhattacharjee, and Charles C. Kemp, IROS Workshop on See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation, 2015 |
 |
Model predictive control for fast reaching in clutter, Marc D. Killpack, Ariel Kapusta, and Charles C. Kemp, Autonomous Robots, (online version) 2015 |
 |
Task-centric selection of robot and environment initial configurations for assistive tasks, Ariel Kapusta, Daehyung Park, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015 |
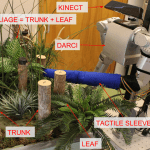 |
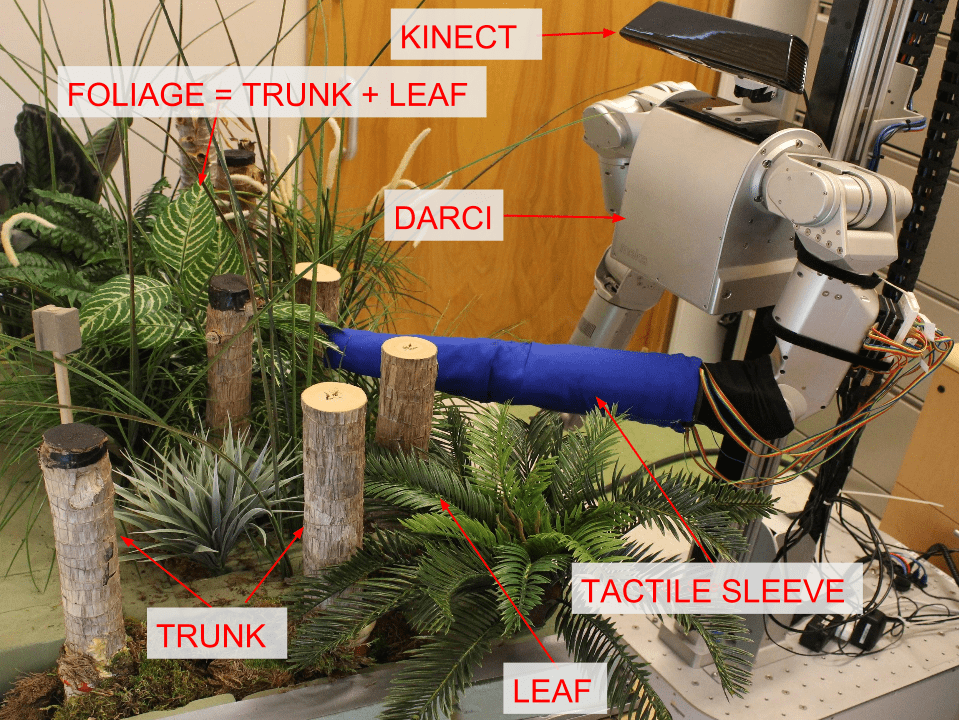
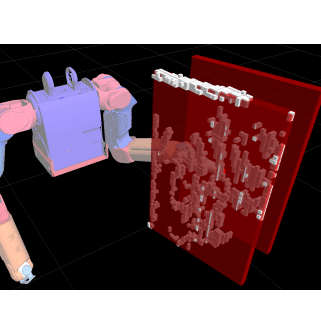
Combining Tactile Sensing and Vision for Rapid Haptic Mapping, Tapomayukh Bhattacharjee, Ashwin A. Shenoi, Daehyung Park, James M. Rehg, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015 |
 |
Material Recognition from Heat Transfer given Varying Initial Conditions and Short-Duration Contact, Tapomayukh Bhattacharjee, Joshua Wade, and Charles C. Kemp, Robotics Science and Systems (RSS), 2015 |
 |
Evaluation by Expert Dancers of a Robot That Performs Partnered Stepping via Haptic Interaction, Tiffany L. Chen, Tapomayukh Bhattacharjee, J. Lucas Mckay, Jacquelyn E. Borinski, Madeleine E. Hackney, Lena H. Ting, and Charles. C. Kemp, PLoS ONE, 2015 |
2014
|
|
 |
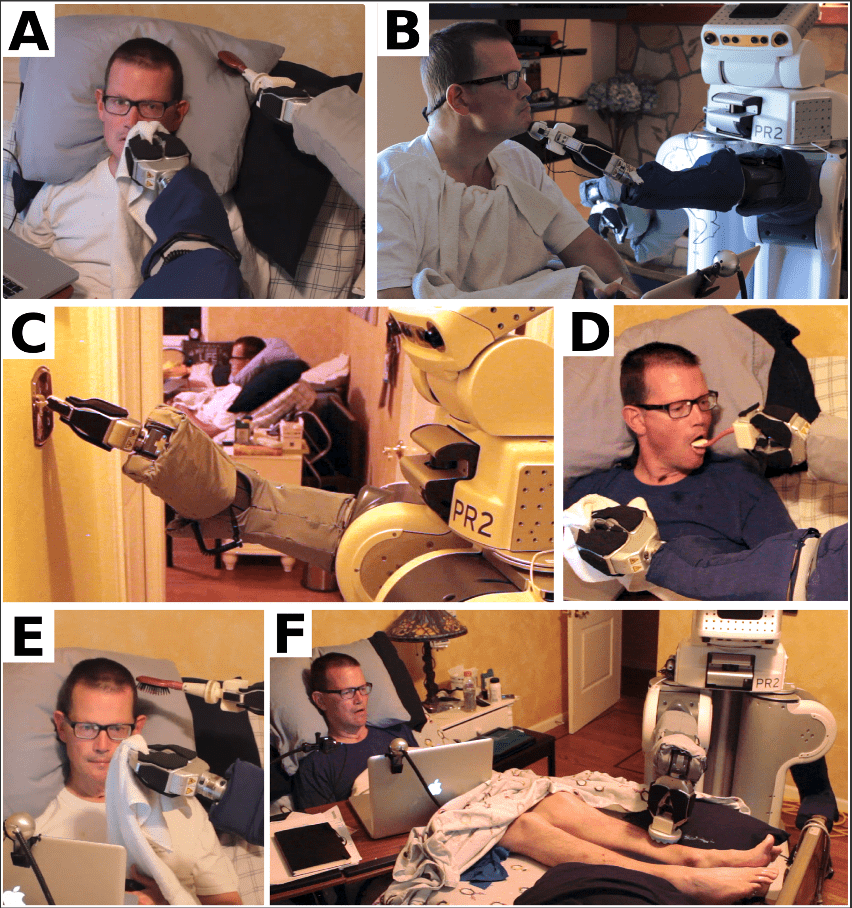
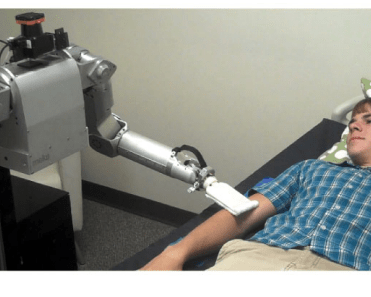
Assistive Mobile Manipulation for Self-Care Tasks Around the Head, Kelsey Hawkins, Phillip M. Grice, Tiffany L. Chen, Chih-Hung King, and Charles C. Kemp, 2014 IEEE Symposium on Computational Intelligence in Robotic Rehabilitation and Assistive Technologies, 2014 |
 |
Interleaving Planning and Control for Efficient Haptically-guided Reaching in Unknown Environments, Daehyung Park, Ariel Kapusta, Jeffrey Hawke, and Charles C. Kemp, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2014 |
 |
Inferring Object Properties from Incidental Contact with a Tactile Sensing Forearm, Tapomayukh Bhattacharjee, James M. Rehg, and Charles C. Kemp, 1st version of journal article posted to this website as a downloadable preprint PDF on September 17 2014, arXiv:1409.4972, 2014 |
 |
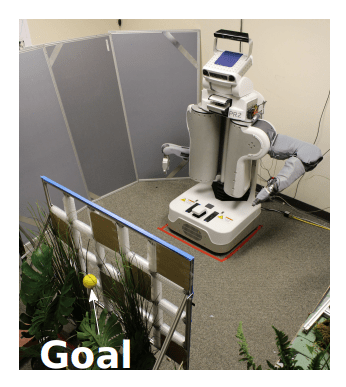
Learning to Reach into the Unknown: Selecting Initial Conditions When Reaching in Clutter, Daehyung Park, Ariel Kapusta, You Keun Kim, James M. Rehg, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014 |
 |
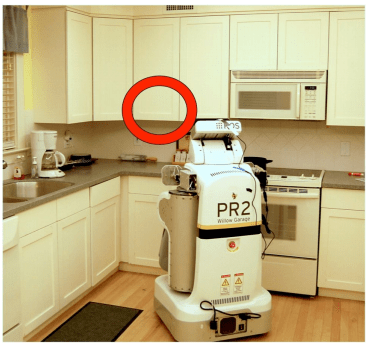
Finding and Navigating to Household Objects with UHF RFID Tags by Optimizing RF Signal Strength, Travis Deyle, Matt Reynolds, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014 |
 |
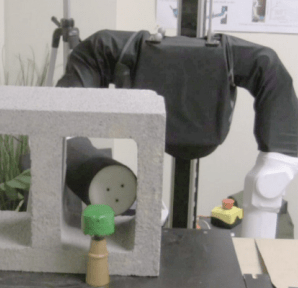
A Robotic System for Reaching in Dense Clutter that Integrates Model Predictive Control, Learning, Haptic Mapping, and Planning, Tapomayukh Bhattacharjee, Phillip M. Grice, Ariel Kapusta, Marc D. Killpack, Daehyung Park, and Charles C. Kemp, IROS 2014 workshop: 3rd Workshop on Robots in Clutter: Perception and Interaction in Clutter, 2014 |
2013
|
|
 |
An Investigation of Responses to Robot-Initiated Touch in a Nursing Context, Tiffany L. Chen, Chih-Hung Aaron King, Andrea L. Thomaz, and Charles C. Kemp, International Journal of Social Robotics, 2013 |
 |
Autonomously Learning to Visually Detect Where Manipulation Will Succeed, Hai Nguyen and Charles C. Kemp, Autonomous Robots, 2013 |
 |
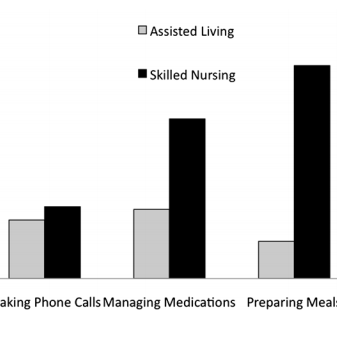
Identifying the Potential for Robotics to Assist Older Adults in Different Living Environments, Tracy L. Mitzner, Tiffany L. Chen, Charles C. Kemp, and Wendy A. Rogers, International Journal of Social Robotics, 2013 |
 |
Fast Reaching in Clutter While Regulating Forces Using Model Predictive Control, Marc D. Killpack and Charles C. Kemp, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2013 |
 |
Rapid Categorization of Object Properties from Incidental Contact with a Tactile Sensing Robot Arm, Tapomayukh Bhattacharjee, Ariel Kapusta, James M. Rehg, and Charles C. Kemp, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2013 |
 |
Whole-arm Tactile Sensing for Beneficial and Acceptable Contact During Robotic Assistance, Phillip M. Grice, Marc D. Killpack, Advait Jain, Sarvagya Vaish, Jeffrey Hawke, and Charles C. Kemp, Accepted to the 13th International Conference on Rehabilitation Robotics (ICORR), 2013 |
 |
Reaching in Clutter with Whole-Arm Tactile Sensing, Advait Jain, Marc D. Killpack, Aaron Edsinger, and Charles C. Kemp, The International Journal of Robotics Research, 2013 |
 |
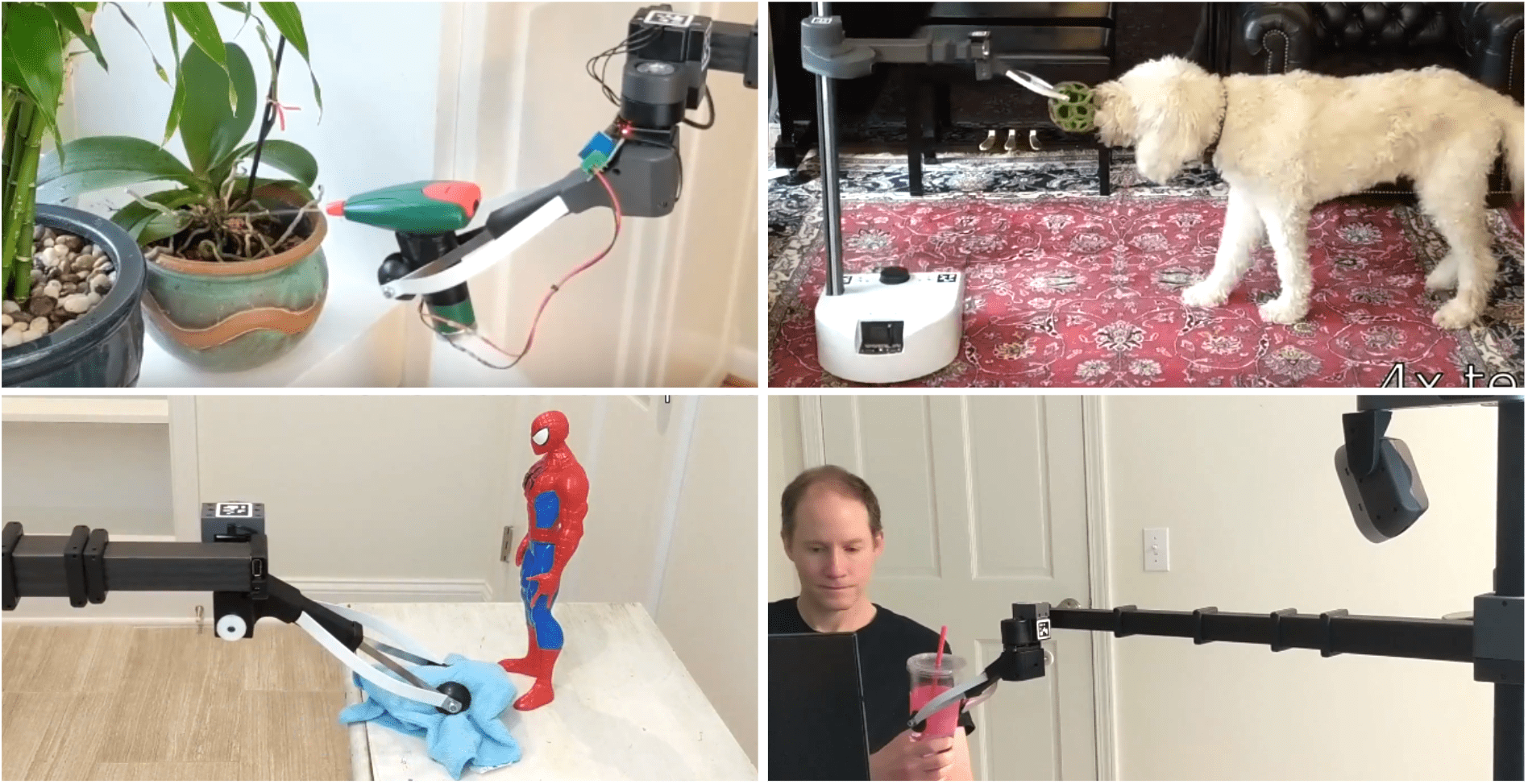
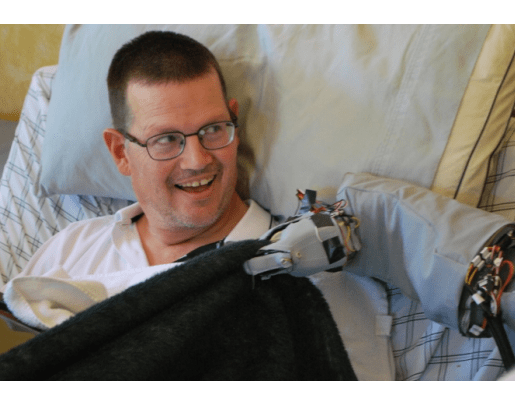
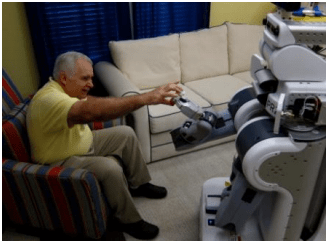
Robots for humanity: Using assistive robotics to empower people with disabilities, Tiffany L. Chen, Matei Ciocarlie, Steve Cousins, Phillip Grice, Kelsey Hawkins, Kaijen Hsiao, Charles C. Kemp, Chih-Hung King, Daniel A. Lazewatsky, Adam Leeper, Hai Nguyen, Andreas Paepcke, Caroline Pantofaru, William D. Smart, and Leila Takayama, IEEE Robotics & Automation Magazine 20 (1), 30-39, 2013 |
 |
Older Adults Medication Management in the Home: How can Robots Help?, Akanksha Prakash, Jenay M. Beer, Travis Deyle, Cory-Ann Smarr, Tiffany L. Chen, Tracy L. Mitzner, Charles C. Kemp, and Wendy A. Rogers, 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2013 |
 |
Tactile Sensing over Articulated Joints with Stretchable Sensors, Tapomayukh Bhattacharjee, Advait Jain, Sarvagya Vaish, Marc D. Killpack, and Charles C. Kemp, IEEE World Haptics Conference (WHC 2013), 2013 |
 |
Improving Robot Manipulation with Data-Driven Object-Centric Models of Everyday Forces, Advait Jain and Charles C. Kemp, Autonomous Robots, 2013 |
 |
In-Hand Radio Frequency Identification (RFID) for Robotic Manipulation, Travis Deyle, Christopher Tralie, Matthew Reynolds, and Charles C. Kemp, IEEE International Conference on Robotics and Automation, 2013 |
 |
ROS Commander (ROSCo): Behavior Creation for Home Robots, Hai Nguyen, Matei Ciocarlie, Kaijen Hsiao, and Charles C. Kemp, IEEE International Conference on Robotics and Automation, 2013 |
2012
|
|
 |
Haptic Classification and Recognition of Objects Using a Tactile Sensing Forearm, Tapomayukh Bhattacharjee, James M. Rehg, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2012 |
 |
The Wouse: A Wearable Wince Detector to Stop Assistive Robots, Phillip M. Grice, Andy Lee, Henry W. Evans, and Charles C. Kemp, IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2012 |
 |
Informing Assistive Robots with Models of Contact Forces from Able-Bodied Face Wiping and Shaving, Kelsey Hawkins, Chih-Hung King, Tiffany L. Chen, and Charles C. Kemp, IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2012 |
 |
A Robotic System for Autonomous Medication and Water Delivery, Victor Emeli, Alan R. Wagner, and Charles C. Kemp, Georgia Institute of Technology, GT-IC-12-01, 2012 |
|
Older Adults’ Preferences for and Acceptance of Robot Assistance for Everyday Living Tasks, Cory-Ann Smarr, Akanksha Prakash, Jenay Beer, Tracy L. Mitzner, Charles C. Kemp, and Wendy Rogers, 56th Annual Meeting of the Human Factors and Ergonomics Society (HFES), 2012 |
|
“Commanding Your Robot” Older Adults Preferences for Methods of Robot Control, Jenay M. Beer, Cory-Ann Smarr, Akanksha Prakash, Tracy Mitzner, Charles C. Kemp, and Wendy Rogers, 56th Annual Meeting of the Human Factors and Ergonomics Society (HFES), 2012 |
 |
The Domesticated Robot: Design Guidelines for Assisting Older Adults to Age in Place, Jenay M. Beer, Cory-Ann Smarr, Tiffany L. Chen, Akanksha Prakash, Tracy L. Mitzner, Charles C. Kemp, and Wendy A. Rogers, 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2012 |