
This project Introduces a communication framework to facilitate efficient information synchronization between an autonomous system and a human operator under scenarios where instant data transfer is not available. We utilize mental models to represent the system’s high-level state and employ a replanning algorithm to adapt to the dynamically changing environment in real time. Our work […]
Human-AI Interaction in Autonomous Aerial Vehicles: A MedEvac Scenario
This project explores the interaction between human operators (novice flight medics) and AI pilots in autonomous aerial vehicles during medical evacuation situations. The primary objective is to evaluate how changes in workload and cognitive biases influence the fluency of human-AI interaction and overall mission effectiveness. Through simulated medical evaluation scenarios, this research seeks to assess […]
STARLIT – xGEO Wargames
This project aims to design wargames for space scenarios for the next 20 years, particularly in the xGEO domain. The xGEO domain presents new challenges as many operators do not have experience in this domain, resulting in training gaps. We are focused on designing scenarios specific to the cislunar space. Starting now, this project is […]
Exploring Shared Mental Models in Household Human-Robot Teams
In human-human teams, we often infer the situation awareness of our teammates to inform our planning and decision-making. What if we applied this to human-AI teams? This project explores how autonomous systems can estimate the belief states of human teammates. We deploy a robot agent to a collaborative household cooking domain, where the agent constructs […]
Project SURI: Multi-Phenomenological, Autonomous, and Understandable SDA and XDA Decision Support
As a multi-institutional effort between CU Boulder, Georgia Tech, and Texas A&M, this research serves to utilize developments in cognitive engineering, autonomy, and decision-making in the context of modern astrodynamics to improve multi-target tracking and dim object detection. While CU Boulder & Texas A&M will be focusing on sensor exploitation, placement, and processing, the CEC […]
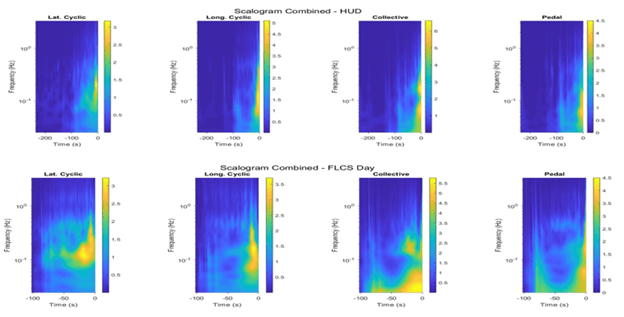
Multimodal Cueing Systems for Rotorcraft Performance in High-Workload Environments
The Vertical Lift Research Center of Excellence (VLRCOE) Rotorcraft Flight Simulation Laboratory is tasked with conducting research into cueing modalities that improve situational awareness and reduce pilot workload during the critical phases of flight across a broad spectrum of flight operations, both maritime and land-based. Our research is multidisciplinary, drawing from the fields of aviation […]
Human-AI Interaction in Autonomous Aerial Vehicles
Looking 10-20 years into the future, in the rapidly advancing world of autonomous, special ops, cargo, and medevac aircraft, all of the basic aviation functions will likely be handled completely and competently by Al agents embedded within air vehicles. Under nominal conditions (and many basic off-nominal situations) the Al-controlled vehicle will operate autonomously and independently without input from onboard […]
Investigation of Critical Attributes for Transparency and Operator Performance in Human Autonomy Teaming (TOPHAT) for Intelligent Mission Planning

Teams tend to be high-performing when they have an accurate shared mental model. A shared mental model (SMM) is the understanding of the exterior world, as well as who within a team has both the ability to perform certain tasks as well as the responsibility to see that they are performed correctly. It incorporates understanding bout who […]
Real-time guidance algorithms for helicopter shipboard landing
Helicopter shipboard landing is one of the most challenging operations for pilots to execute owing to the random ship deck motion, turbulence due to airwake interactions, and poor visibility due to sea sprays, weather conditions and at night. Active research in this field has been focused on developing schemes to either autonomously pilot the vehicle […]
Impact of Shared Mental Models on Human-AI Interaction and Mission Effectiveness
Human teams are most effective when the members of the team utilize a shared mental model (SMM), meaning a shared perception of goals and actions through effective communication and an understanding of their fellow team members’ goals and likely methods. Currently humans and AI teams share no such model. At best, humans working closely with […]