
2024
 |
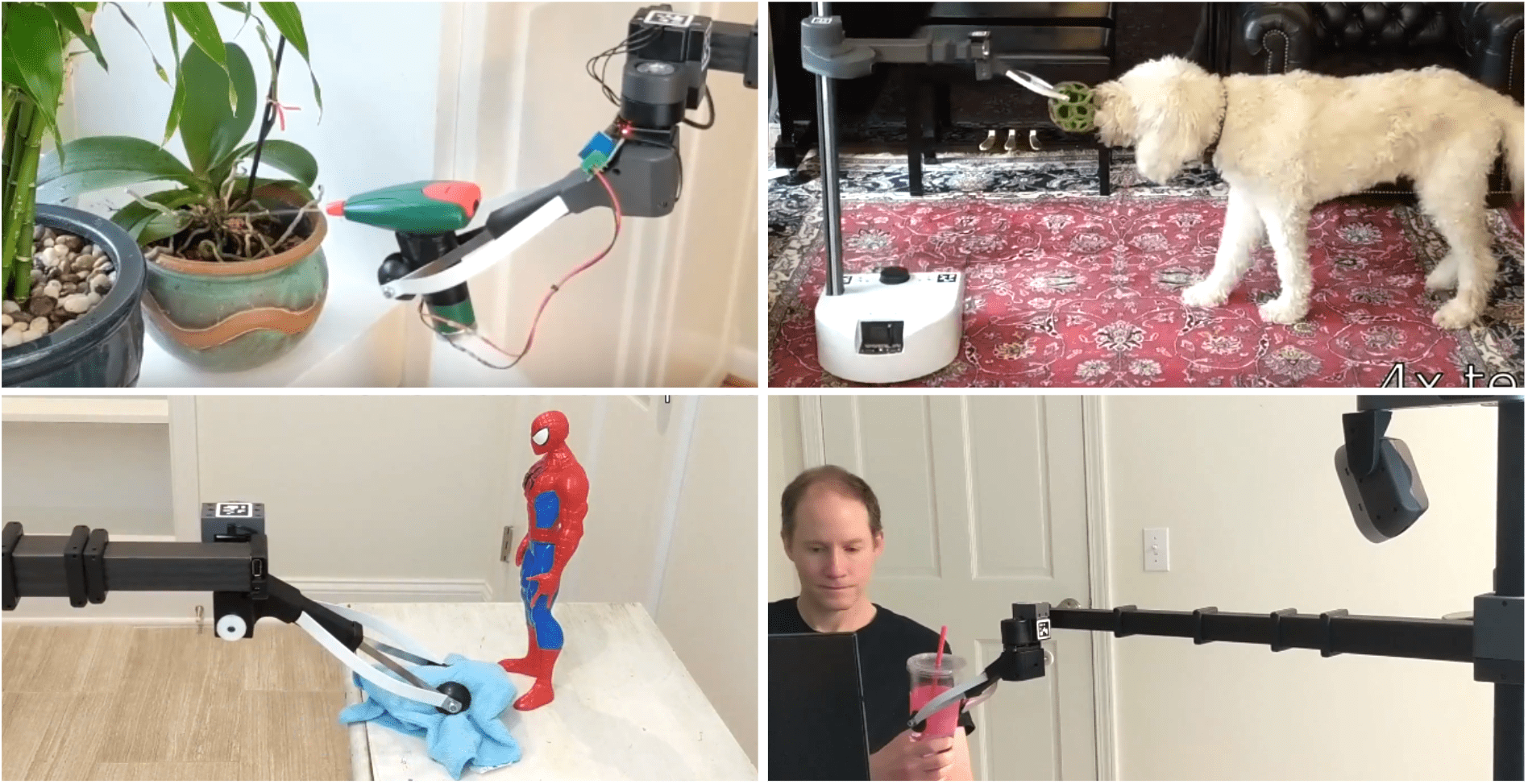
Stretch with Stretch: Physical Therapy Exercise Games Led by a Mobile Manipulator. Matthew Lamsey, You Liang Tan, Meredith D. Wells, Madeline Beatty, Zexuan Liu, Arjun Majumdar, Kendra Washington, Jerry Feldman, Naveen Kuppuswamy, Elizabeth Nguyen, Arielle Wallenstein, Madeleine E. Hackney, Charles C. Kemp, accepted to ICRA, 2024. (website with videos) |
 |
The Un-Kidnappable Robot: Acoustic Localization of Sneaking People, Mengyu Yang, Patrick Grady, Samarth Brahmbhatt, Arun Balajee Vasudevan, Charles C. Kemp, James Hays, accepted to ICRA, 2024 (website with data and videos). |
 |
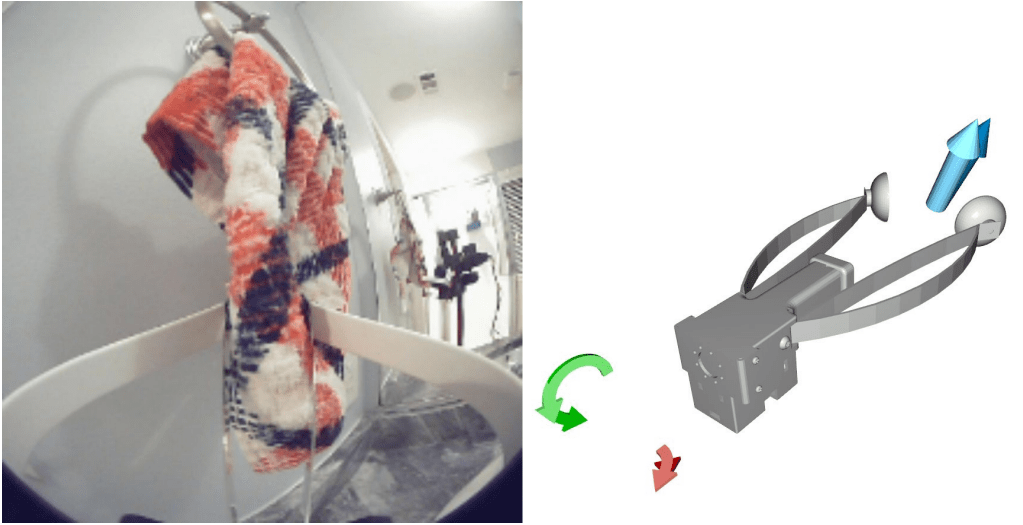
ForceSight: Text-Guided Mobile Manipulation with Visual-Force Goals, Jeremy A. Collins, Cody Houff, You Liang Tan, Charles C. Kemp, accepted to ICRA, 2024. (website with data, code, models, and videos) |
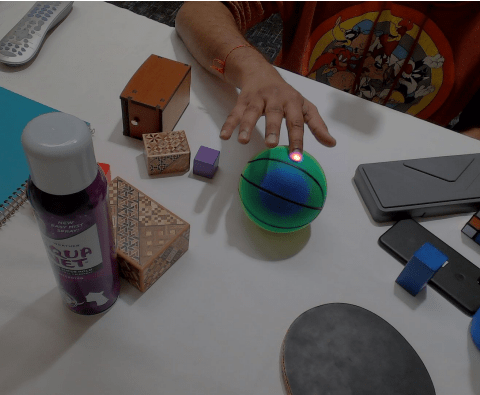 |
PressureVision++: Estimating Fingertip Pressure From Diverse RGB Images, Patrick Grady, Jeremy A. Collins, Chengcheng Tang, Christopher D. Twigg, Kunal Aneja, James Hays, and Charles C. Kemp. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, pp. 8698-8708. 2024. (website with data, code, models, and videos) |
2023
 |
Visual Contact Pressure Estimation for Grippers in the Wild, Jeremy A. Collins, Cody Houff, Patrick Grady, Charles C. Kemp, Accepted to IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023. |
 |
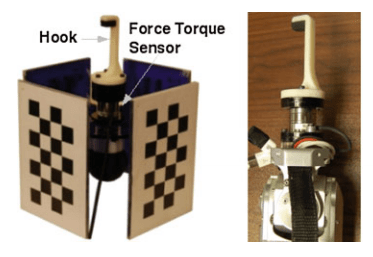
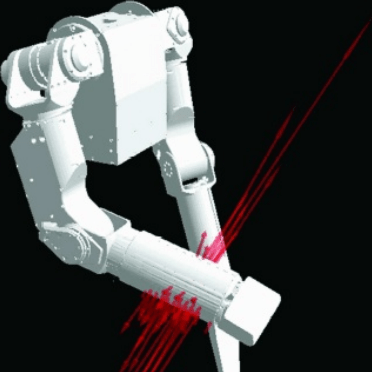
Force/Torque Sensing for Soft Grippers using an External Camera, Jeremy A. Collins, Patrick Grady, Charles C. Kemp, IEEE International Conference on Robotics and Automation (ICRA), 2023. |
2022
 |
Visual Pressure Estimation and Control for Soft Robotic Grippers, Patrick Grady, Jeremy A. Collins, Samarth Brahmbhatt, Christopher D. Twigg, Chengcheng Tang, James Hays, Charles C. Kemp, Accepted to IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022. (link to arxiv.org) |
 |
PressureVision: Estimating Hand Pressure from a Single RGB Image, Patrick Grady, Chengcheng Tang, Samarth Brahmbhatt, Christopher D. Twigg, Chengde Wan, James Hays, Charles C. Kemp, Accepted to the European Conference on Computer Vision (ECCV) 2022. (link to arxiv.org) (Accepted for Oral Presentation) |
 |
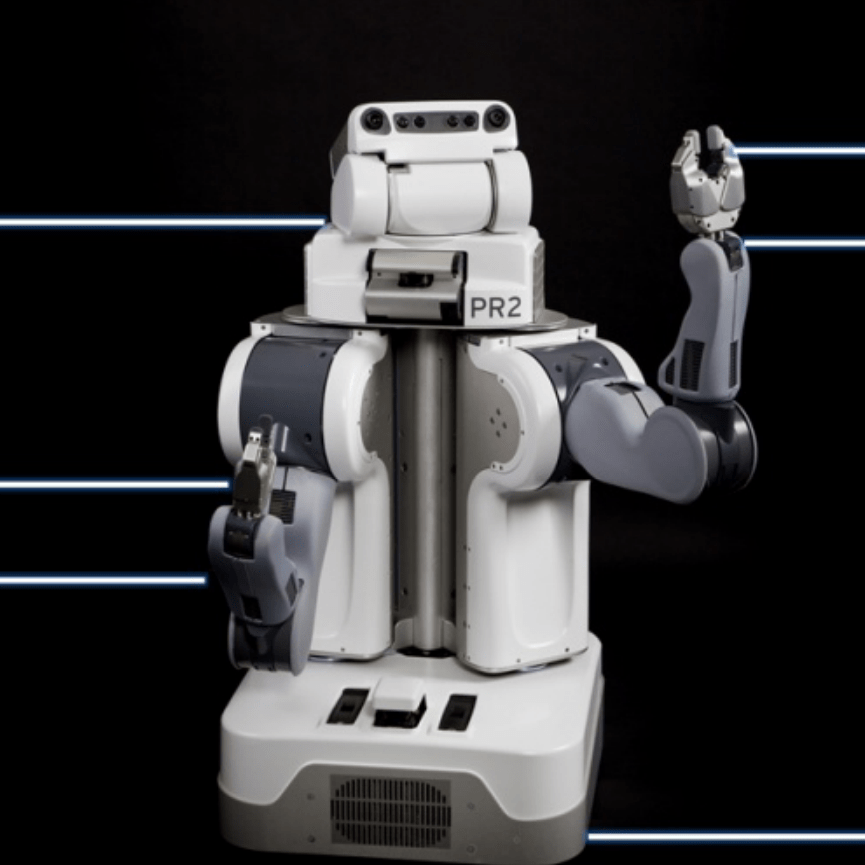
The Design of Stretch: A Compact, Lightweight Mobile Manipulator for Indoor Human Environments, Charles C. Kemp, Aaron Edsinger, Henry M. Clever and Blaine Matulevich, IEEE International Conference on Robotics and Automation (ICRA), 2022. (link to IEEE paper, link to arxiv.org) |
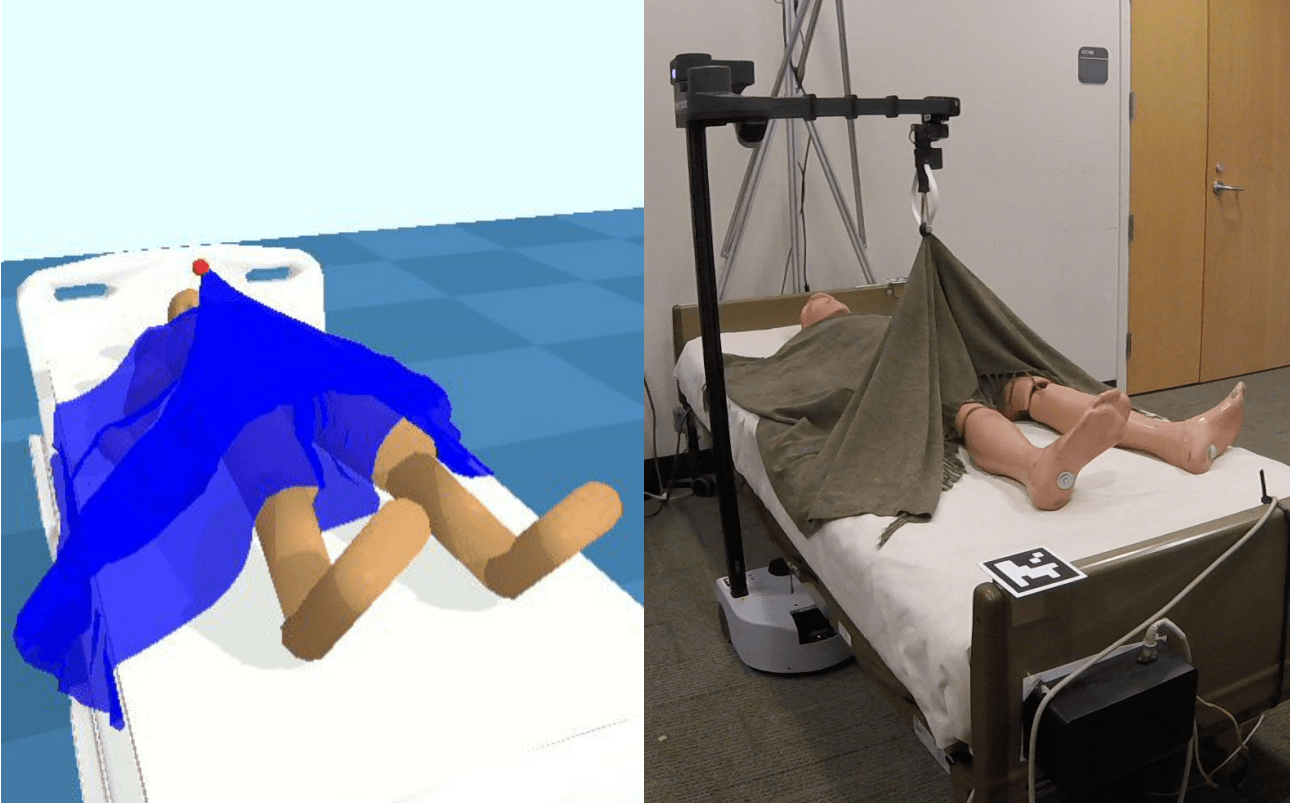 |
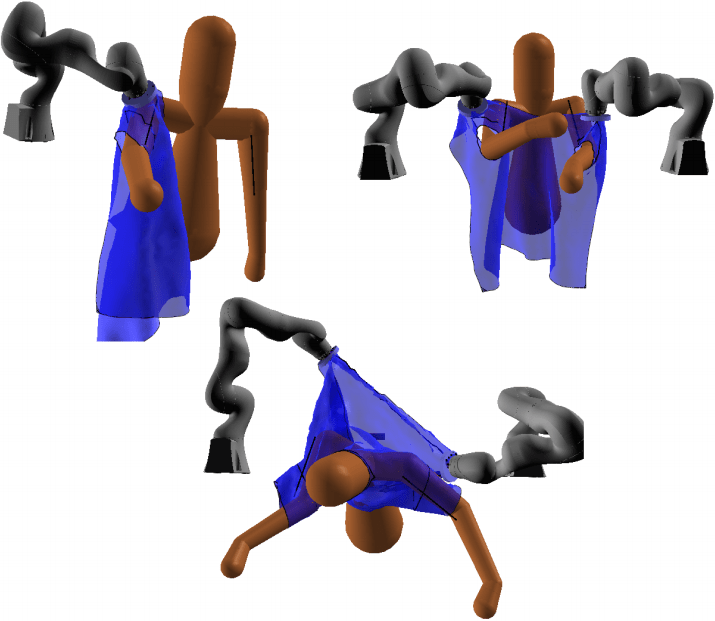
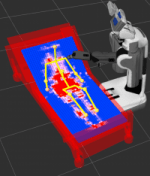
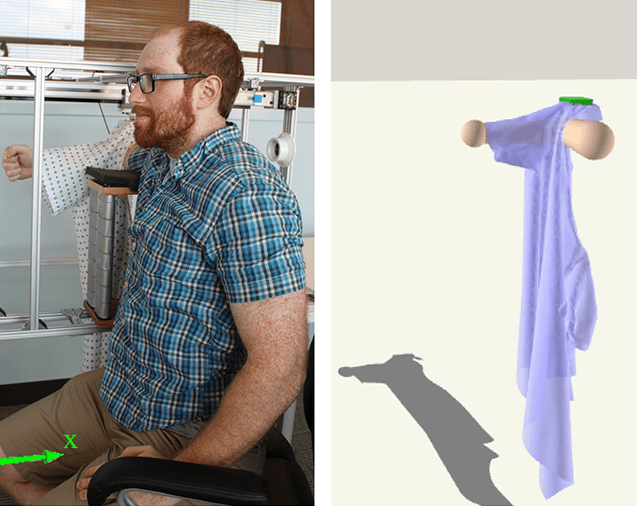
Bodies Uncovered: Learning to Manipulate Real Blankets Around People via Physics Simulations, Kavya Puthuveetil, Charles C. Kemp, Zackory Erickson, IEEE Robotics and Automation Letters (RA-L), 2022. |
 |
BodyPressure – Inferring Body Pose and Contact Pressure from a Depth Image, Henry M. Clever, Patrick Grady, Greg Turk, Charles C. Kemp, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022. |
 |
Characterizing Multidimensional Capacitive Servoing for Physical Human-Robot Interaction, Zackory Erickson, Henry M. Clever, Vamsee Gangaram, Eliot Xing, Greg Turk, C. Karen Liu, Charles C. Kemp, Accepted to IEEE Transactions on Robotics (T-RO), 2022. (link to arxiv.org) |
2021
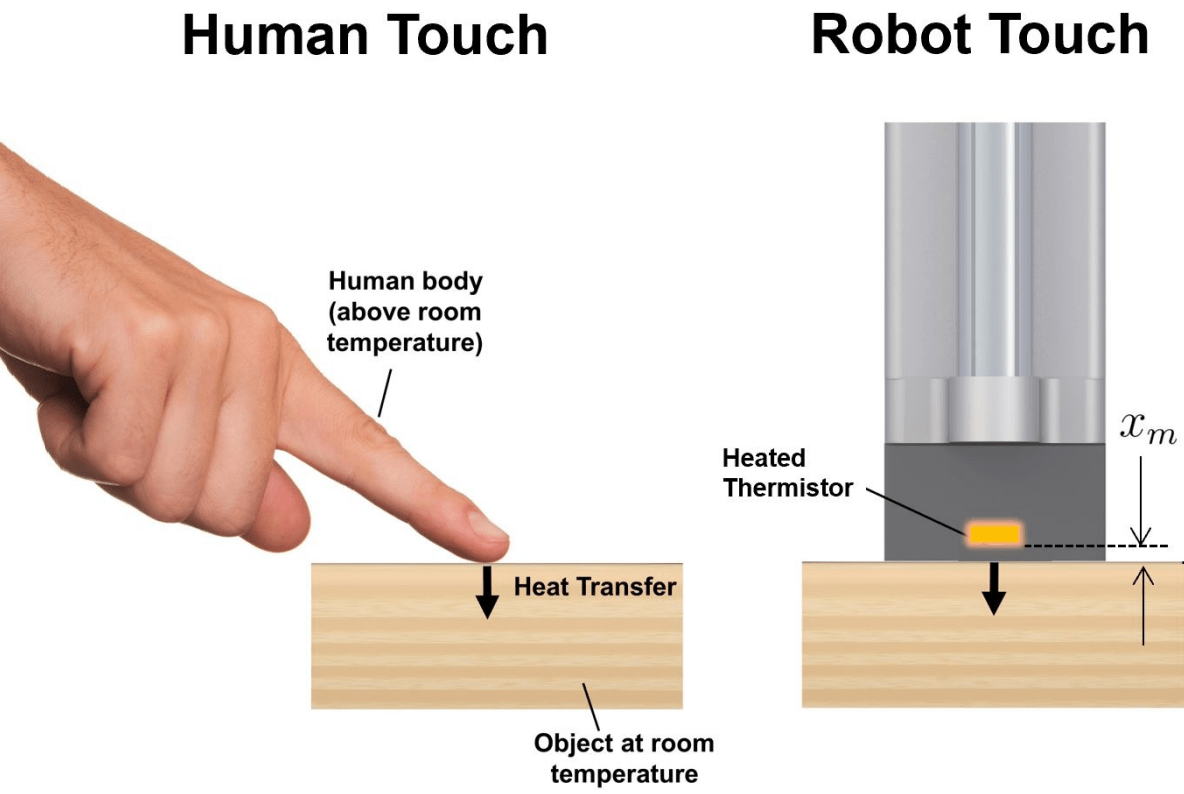 |
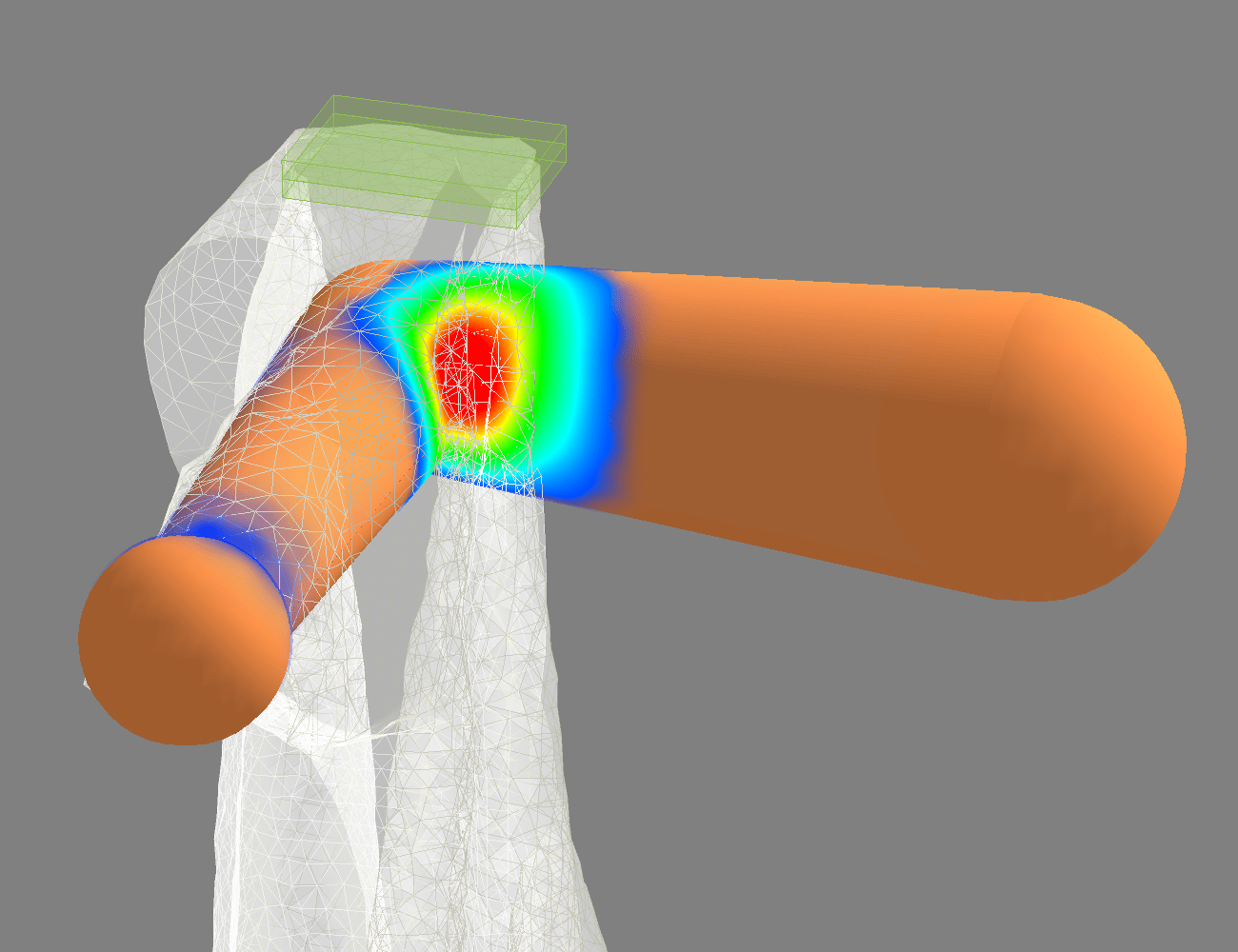
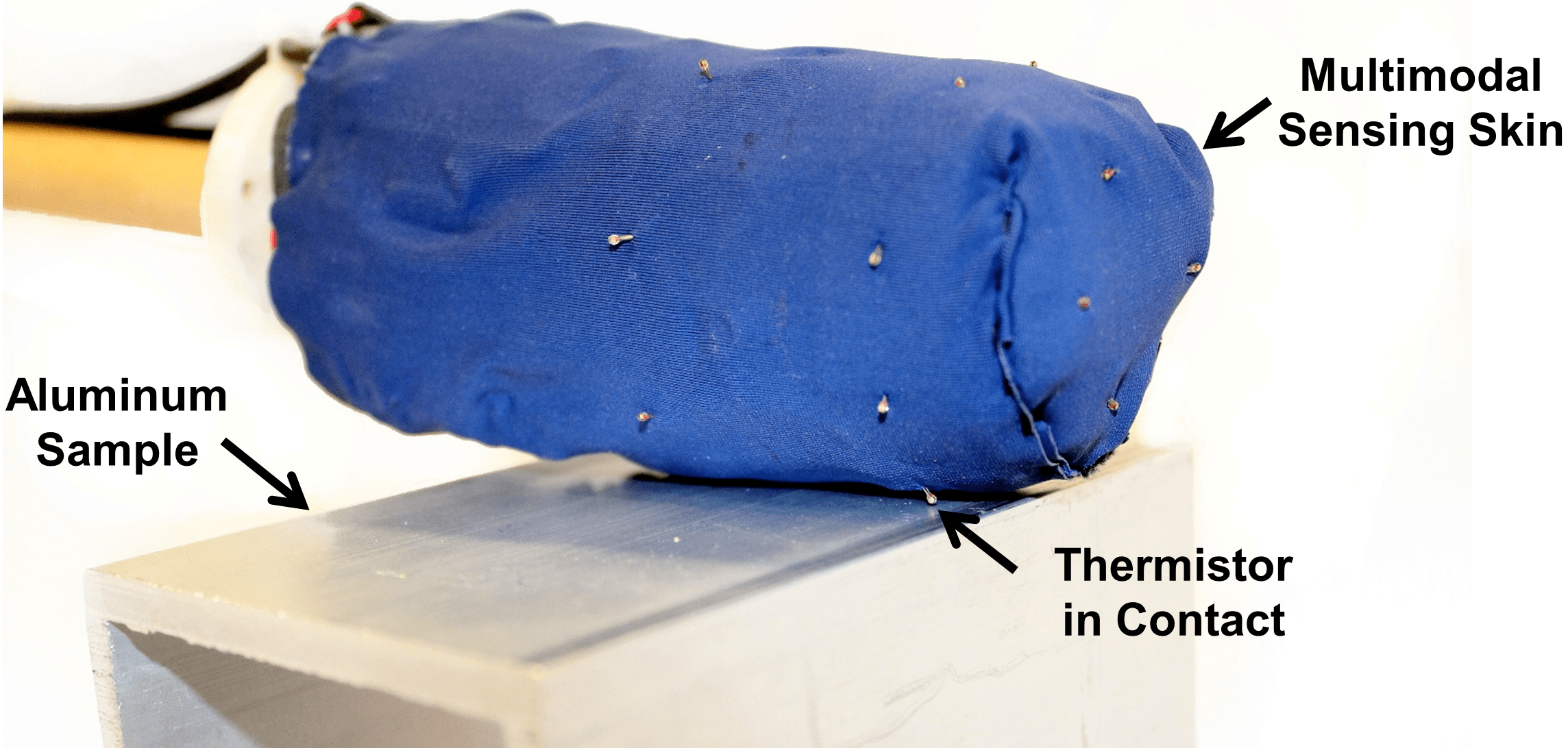
Material Recognition via Heat Transfer Given Ambiguous Initial Conditions, Tapomayukh Bhattacharjee, Henry M. Clever, Joshua M Wade, Charles C. Kemp, IEEE Transactions on Haptics, 2021. |
 |
ContactOpt: Optimizing Contact to Improve Grasps, Patrick Grady, Chengcheng Tang, Christopher D. Twigg, Minh Vo, Samarth Brahmbhatt, Charles C. Kemp, Conference on Computer Vision and Pattern Recognition (CVPR), 2021. (Accepted for Oral Presentation) |
2020
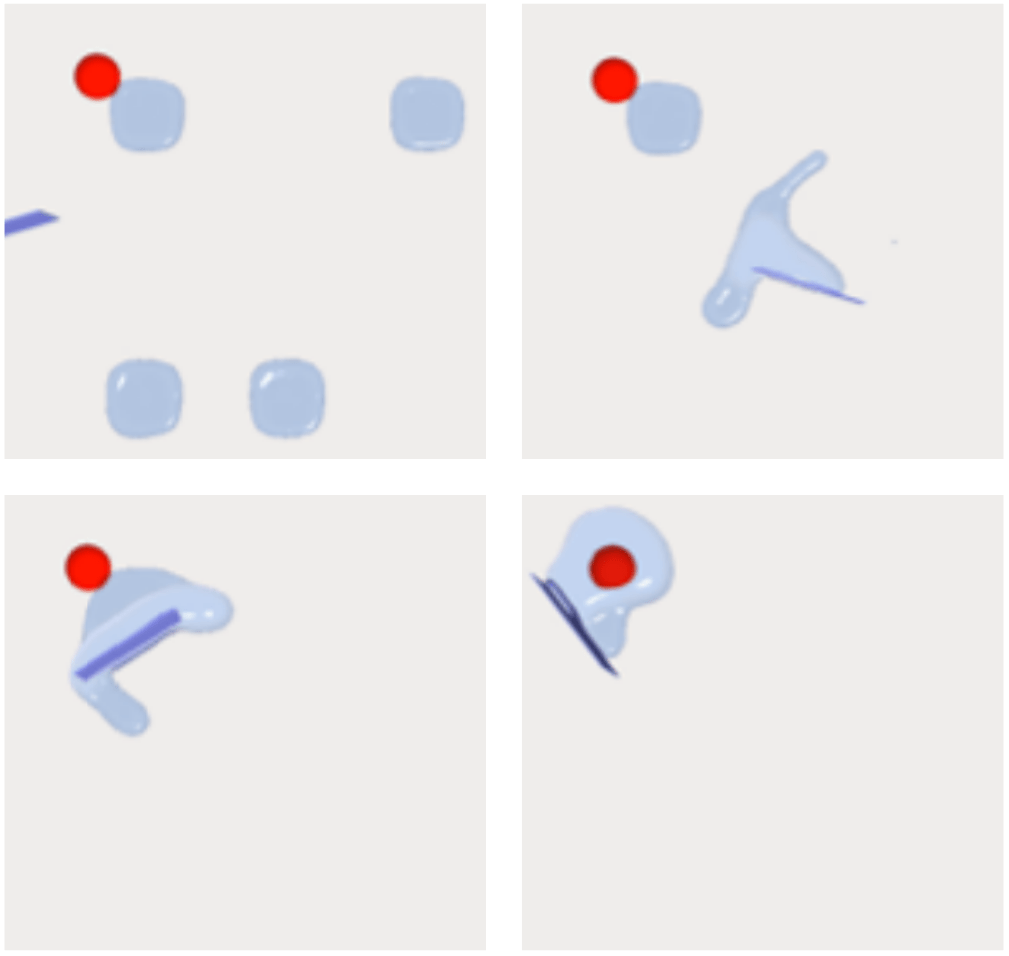 |
Learning to Manipulate Amorphous Materials, Yunbo Zhang, Wenhao Yu, C. Karen Liu, Charles C. Kemp, Greg Turk, ACM Transactions on Graphics, Volume 39, Issue 6, December 2020. |
 |
ContactPose: A Dataset of Grasps with Object Contact and Hand Pose, Samarth Brahmbhatt, Chengcheng Tang, Christopher D. Twigg, Charles C. Kemp, and James Hays, The European Conference on Computer Vision (ECCV), 2020. |
| Assistive VR Gym: Interactions with Real People to Improve Virtual Assistive Robots, Zackory Erickson*, Yijun Gu*, and Charles C. Kemp, IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2020. | |
| Multimodal Material Classification for Robots using Spectroscopy and High Resolution Texture Imaging, Zackory Erickson, Eliot Xing, Bharat Srirangam, Sonia Chernova, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. | |
| Bodies at Rest: 3D Human Pose and Shape Estimation from a Pressure Image using Synthetic Data, Henry M. Clever, Zackory Erickson, Ariel Kapusta, Greg Turk, C. Karen Liu, Charles C. Kemp. Conference on Computer Vision and Pattern Recognition (CVPR), 2020. (Accepted for Oral Presentation) | |
| Assistive Gym: A Physics Simulation Framework for Assistive Robotics, Zackory Erickson, Vamsee Gangaram, Ariel Kapusta, C. Karen Liu, and Charles C. Kemp, IEEE International Conference on Robotics and Automation (ICRA), 2020. | |
 |
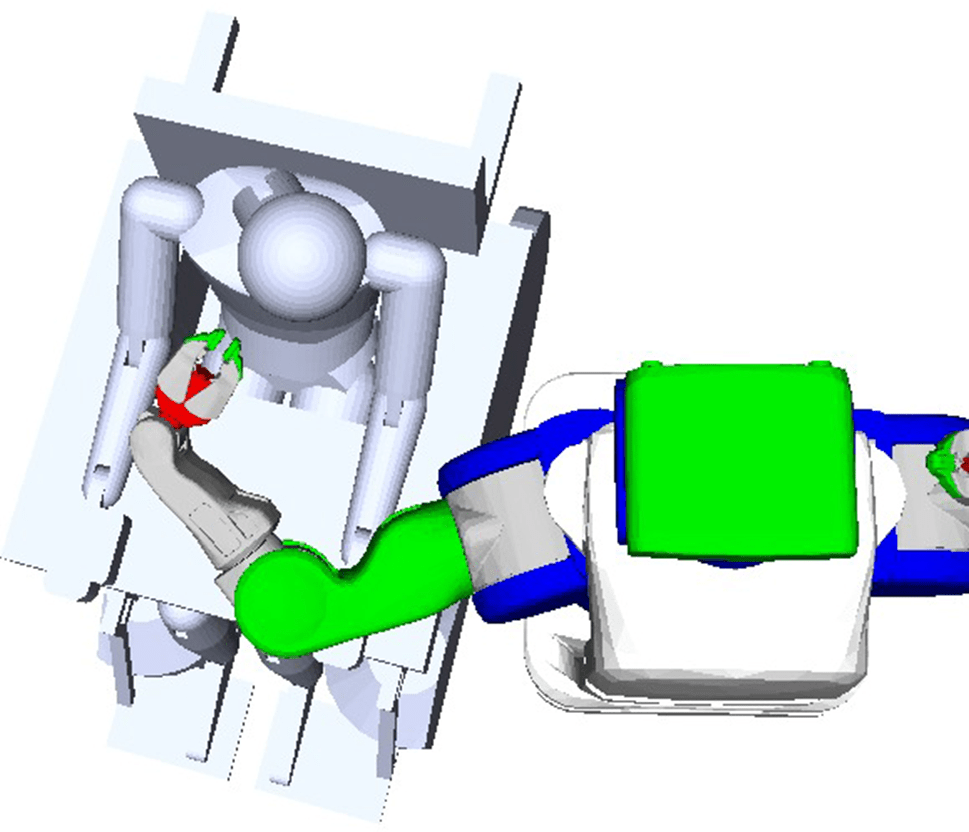
Learning to Collaborate from Simulation for Robot-Assisted Dressing, Alex Clegg, Zackory Erickson, Patrick Grady, Greg Turk, Charles C. Kemp, and C. Karen Liu, IEEE Robotics and Automation Letters (RA-L), 2020. |
2019
| Active Robot-Assisted Feeding with a General-Purpose Mobile Manipulator: Design, Evaluation, and Lessons Learned, Daehyung Park, Yuuna Hoshi, Harshal P Mahajan, Ho Keun Kim, Zackory Erickson, Wendy A Rogers, Charles C Kemp, Robotics and Autonomous Systems, 2019. | |
 |
A system for bedside assistance that integrates a robotic bed and a mobile manipulator, Ariel S. Kapusta, Phillip M. Grice, Henry M. Clever, Yash Chitalia, Daehyung Park, Charles C. Kemp, PLoS ONE 14(10), 2019. |
 |
Personalized collaborative plans for robot-assisted dressing via optimization and simulation, Ariel Kapusta, Zackory Erickson, Henry M. Clever, Wenhao Yu, C. Karen Liu, Greg Turk, Charles C. Kemp, Autonomous Robots, 2019. |
| Multidimensional Capacitive Sensing for Robot-Assisted Dressing and Bathing, Zackory Erickson, Henry M. Clever, Vamsee Gangaram, Greg Turk, C. Karen Liu, and Charles C. Kemp, International Conference on Rehabilitation Robotics (ICORR), 2019. (Best Student Paper Award) | |
 |
ContactDB: Analyzing and Predicting Grasp Contact via Thermal Imaging, Samarth Brahmbhatt, Cusuh Ham, Charles C. Kemp, and James Hays, Conference on Computer Vision and Pattern Recognition (CVPR), 2019. (Best Paper Finalist, Oral Presentation) |
| Classification of Household Materials via Spectroscopy, Zackory Erickson, Nathan Luskey, Sonia Chernova, and Charles C. Kemp, IEEE Robotics and Automation Letters (RA-L), 2019. (presented at ICRA 2019) (Best Paper Award in Service Robotics – Finalist at IEEE Conference on Robotics and Automation (ICRA 2019)) | |
 |
Task-centric optimization of configurations for assistive robots, Ariel Kapusta and Charles C. Kemp, Autonomous Robots, 2019. |
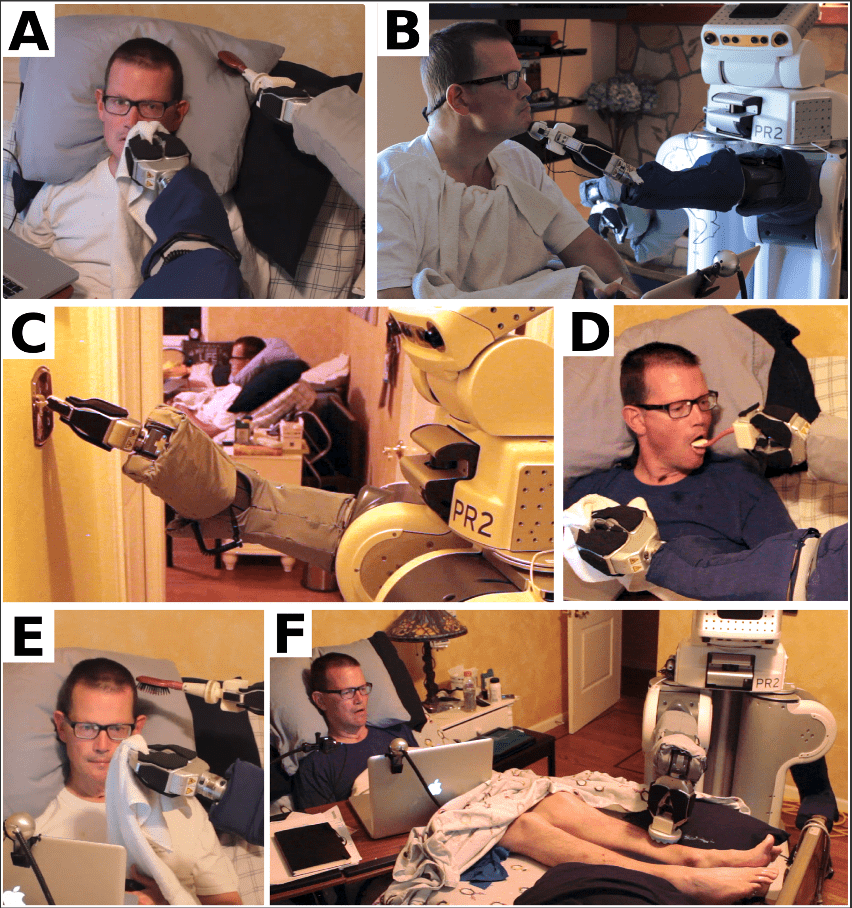 |
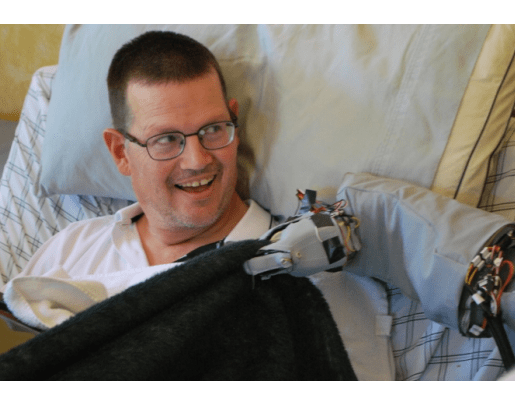
In-home and remote use of robotic body surrogates by people with profound motor deficits, Phillip M. Grice and Charles C. Kemp, PLoS ONE 14(3), 2019. (One of 19 papers selected as Editors’ Picks 2019) |
 |
Multimodal anomaly detection for assistive robots, Daehyung Park, Hokeun Kim, and Charles C. Kemp, Autonomous Robots, 2019. |
2018
 |
3D Human Pose Estimation on a Configurable Bed from a Pressure Image, Henry M. Clever, Ariel Kapusta, Daehyung Park, Zackory Erickson, Yash Chitalia, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 |
 |
Towards Material Classification of Scenes Using Active Thermography, Haoping Bai, Tapomayukh Bhattacharjee, Haofeng Chen, Ariel Kapusta, and Charles C Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018. |
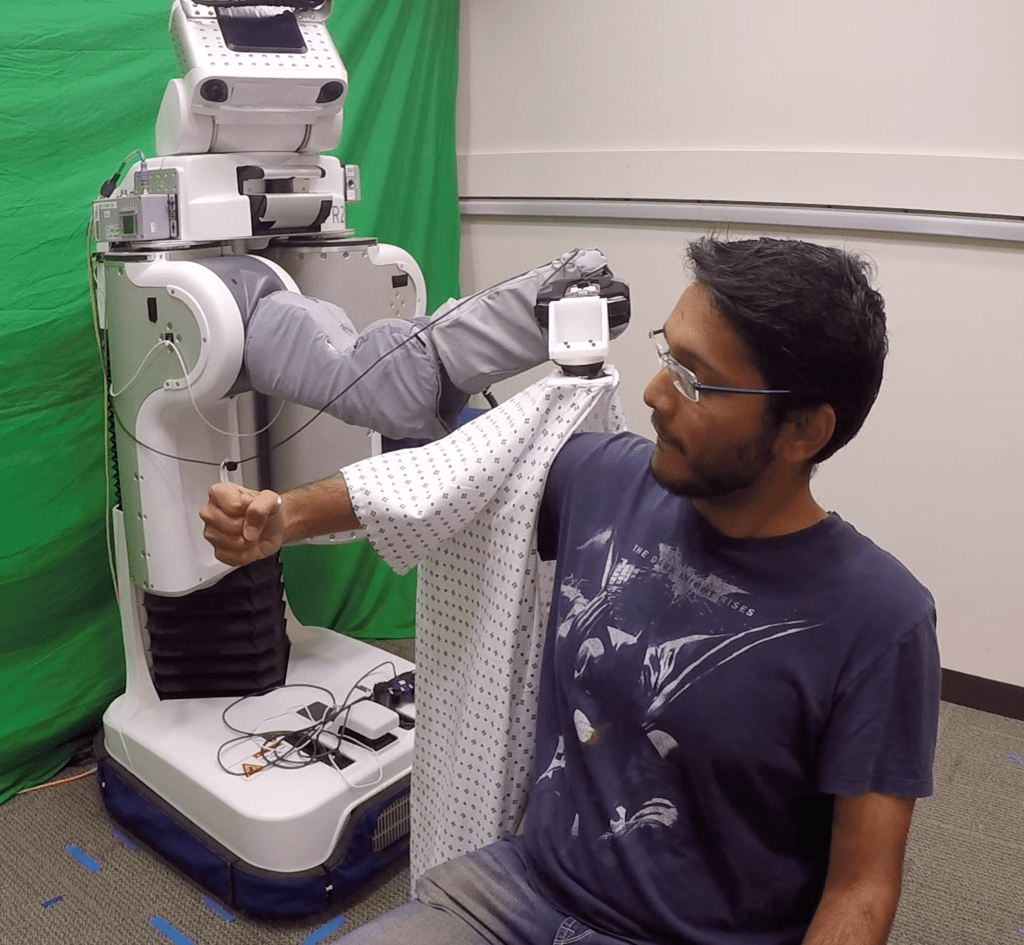 |
Deep Haptic Model Predictive Control for Robot-Assisted Dressing, Zackory Erickson, Henry M. Clever, Greg Turk, C. Karen Liu, and Charles C. Kemp, IEEE International Conference on Robotics and Automation (ICRA), 2018. |
| Tracking Human Pose During Robot-Assisted Dressing using Single-Axis Capacitive Proximity Sensing, Zackory Erickson, Maggie Collier, Ariel Kapusta, Charles C. Kemp, IEEE Robotics and Automation Letters (RA-L), 2018. | |
 |
Multimodal Tactile Perception of Objects in a Real Home, Tapomayukh Bhattacharjee, Henry M. Clever, Joshua Wade, and Charles C. Kemp, IEEE Robotics and Automation Letters (RA-L) , 2018. |
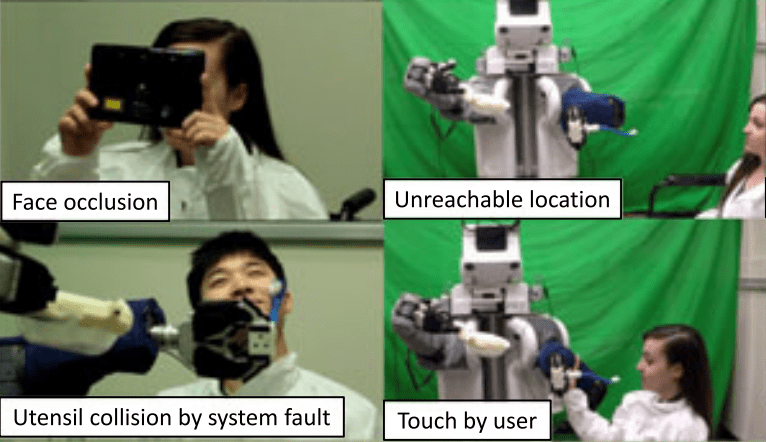 |
A Multimodal Anomaly Detector for Robot-Assisted Feeding Using an LSTM-Based Variational Autoencoder, Daehyung Park, Yuuna Hoshi, and Charles C. Kemp, IEEE Robotics and Automation Letters (RA-L) , 2018. |
 |
Inferring Object Properties with a Tactile Sensing Array Given Varying Joint Stiffness and Velocity, Tapomayukh Bhattacharjee, James M. Rehg, and Charles C. Kemp, International Journal of Humanoid Robotics, Vol. 15, No. 01, 2018. |
2017





























2011
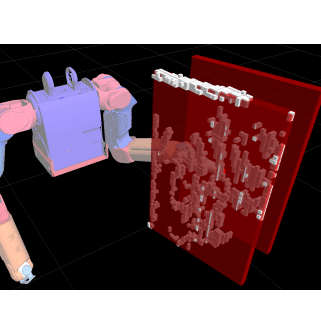
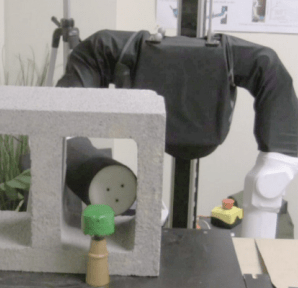
- Manipulation in Clutter with Whole-Arm Tactile Sensing, Advait Jain, Marc D. Killpack, Aaron Edsinger, and Charles C. Kemp, 1st version of published IJRR article submitted to IJRR on December 31 2011 and posted to this website as a downloadable PDF on January 16 2012, arXiv:1304.6146, 2011
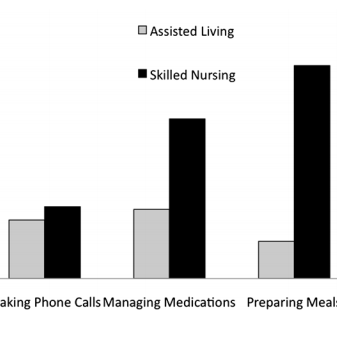
- Older Adults’ Needs for Assistance as a Function of Living Environment, Tracy L. Mitzner, Tiffany L. Chen, Charles C. Kemp, and Wendy A. Rogers, 55th Annual Meeting of the Human Factors and Ergonomics Society (HFES), 2011
- Dusty: An Assistive Mobile Manipulator that Retrieves Dropped Objects for People with Motor Impairments, Chih-Hung King, Tiffany L. Chen, , Jonathan D. Glass, and Charles C. Kemp, Disability and Rehabilitation: Assistive Technology, 2011
- Older Adults’ Acceptance of Assistive Robots for the Home, Tracy L. Mitzner, Cory-Ann Smarr, Jenay M. Beer, Tiffany L. Chen, , Akanksha Prakash, Charles C. Kemp, and Wendy A. Rogers, Georgia Institute of Technology: Human Factors and Aging Laboratory, Technical Report HFA-TR-1105, 2011
- Touched By a Robot: An Investigation of Subjective Responses to Robot-initiated Touch, Tiffany L. Chen, Chih-Hung King, Andrea L. Thomaz, and Charles C. Kemp, 6th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2011
- A Direct Physical Interface for Navigation and Positioning of a Robotic Nursing Assistant, Tiffany L. Chen and Charles C. Kemp, Advanced Robotics, 2011
- Autonomous Active Learning of Task-Relevant Features for Mobile Manipulation, Hai Nguyen and Charles C. Kemp, RSS 2011 Workshop on Mobile Manipulation: Learning to Manipulate, 2011
2010
- RFID-Guided Robots for Pervasive Automation, Travis Deyle, Hai Nguyen, Matt Reynolds, and Charles C. Kemp, IEEE Pervasive Computing, 2010
- Effects of Force Feedback and Arm Compliance on Teleoperation for a Hygiene Task, Chih-Hung King, Marc D. Killpack, and Charles C. Kemp, Eurohaptics, 2010
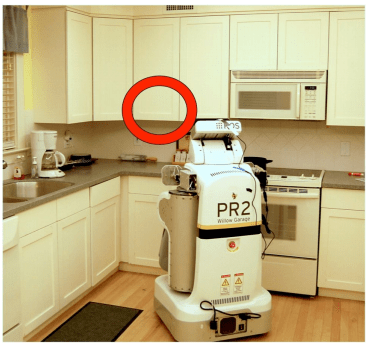
- Perceiving Clutter and Surfaces for Object Placement in Indoor Environments, , , Hai Nguyen, , and Charles C. Kemp, 10th IEEE-RAS International Conference on Humanoid Robots, 2010. (Project Webpage)
- Performance Evaluation Methods for Assistive Mobile Manipulation and Human-Robot Interaction, Tiffany L. Chen and Charles C. Kemp, Performance Metrics for Intelligent Systems (PerMIS’10) Workshop, 2010
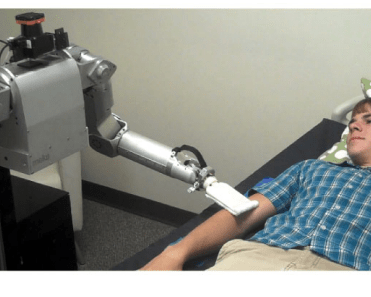
- Towards an Assistive Robot that Autonomously Performs Bed Baths for Patient Hygiene, Chih-Hung King, Tiffany L. Chen, Advait Jain, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2010
- Operating Articulated Objects Based on Experience, , Advait Jain, , Charles C. Kemp, and , IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2010
- Visual Odometry and Control for an Omnidirectional Mobile Robot with a Downward-Facing Camera, Marc D. Killpack, Travis Deyle, Cressel Anderson, and Charles C. Kemp, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2010
- The Complex Structure of Simple Devices: A Survey of Trajectories and Forces that Open Doors and Drawers, Advait Jain, Hai Nguyen, , , and Charles C. Kemp, IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BIOROB), 2010. (Project Webpage)
- Dusty: A Teleoperated Assistive Mobile Manipulator that Retrieves Objects from the Floor, , Chih-Hung King, , and Charles C. Kemp, International Symposium on Quality of Life Technology, 2010. (Project Webpage)
- Pulling Open Doors and Drawers: Coordinating an Omni-directional Base and a Compliant Arm with Equilibrium Point Control. (Finalist for KUKA Service Robotics Best Paper Award), Advait Jain and Charles C. Kemp, IEEE International Conference on Robotics and Automation (ICRA), 2010. (Project Webpage)
- Lead Me by the Hand: Evaluation of a Direct Physical Interface for Nursing Assistant Robots, Tiffany L. Chen and Charles C. Kemp, 5th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2010
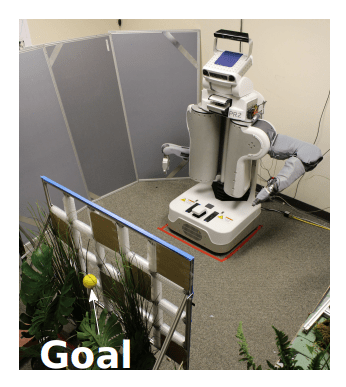
- EL-E: An Assistive Mobile Manipulator that Autonomously Fetches Objects from Flat Surfaces, Advait Jain and Charles C. Kemp, Autonomous Robots, 2010
2009
- A List of Household Objects for Robotic Retrieval Prioritized by People with ALS, Young Sang Choi, Travis Deyle, and Charles C. Kemp, arXiv.org, 0902.2186v1, 2009
- Pulling Open Novel Doors and Drawers with Equilibrium Point Control, Advait Jain and Charles C. Kemp, IEEE-RAS International Conference on Humanoid Robotics (Humanoids), 2009. (Project Webpage)
- PPS-Tags: Physical Perceptual and Semantic Tags for Autonomous Mobile Manipulation, Hai Nguyen, Travis Deyle, Matt Reynolds, and Charles C. Kemp, IROS 2009 workshop: Semantic Perception for Mobile Manipulation, 2009
- Human-Robot Interaction Studies for Autonomous Mobile Manipulation for the Motor Impaired, Young Sang Choi, Cressel Anderson, Travis Deyle, and Charles C. Kemp, Experimental Design for Real-World Systems AAAI Spring Symposium 2009, 2009
- RF Vision: RFID Receive Signal Strength Indicator (RSSI) Images for Sensor Fusion and Mobile Manipulation, Travis Deyle, Hai Nguyen, Matt Reynolds, and Charles C. Kemp, IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), 2009
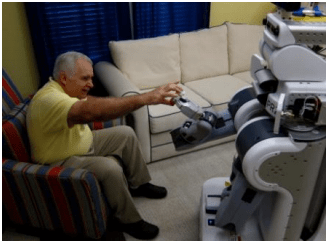
- Hand It Over or Set It Down: A User Study of Object Delivery with an Assistive Mobile Manipulator, Young Sang Choi, Tiffany L. Chen, Advait Jain, Cressel Anderson, Jonathan D. Glass, and Charles C. Kemp, IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2009
- 1000 Trials: An Empirically Validated End Effector that Robustly Grasps Objects from the Floor, Zhe Xu, Travis Deyle, and Charles C. Kemp, IEEE International Conference on Robotics and Automation, 2009
- A List of Household Objects for Robotic Retrieval Prioritized by People with ALS, Young Sang Choi, Travis Deyle, Tiffany L. Chen, Jonathan D. Glass, and Charles C. Kemp, International Conference on Rehabilitation Robotics, 2009
- Behavior-Based Door Opening with Equilibrium Point Control, Advait Jain and Charles C. Kemp, RSS 2009 Workshop: Mobile Manipulation in Human Environments, 2009
2008
- Laser Pointers and a Touch Screen: Intuitive Interfaces for Autonomous Mobile Manipulation for the Motor Impaired, Young Sang Choi, Cressel Anderson, Jonathan D. Glass, and Charles C. Kemp, ACM SIGACCESS Conference on Computers and Accessibility, 2008
- A Clickable World: Behavior Selection Through Pointing and Context for Mobile Manipulation, Hai Nguyen, Advait Jain, Cressel Anderson, and Charles C. Kemp, IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), 2008
- Bio-inspired Assistive Robotics: Service Dogs as a Model for Human-Robot Interaction and Mobile Manipulation, Hai Nguyen and Charles C. Kemp, IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BIOROB), 2008
- Probabilistic UHF RFID tag pose estimation with multiple antennas and a multipath RF propagation model, Travis Deyle, Charles C. Kemp, and Matt Reynolds, IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), 2008
- A Foveated Passive UHF RFID System for Mobile Manipulation, Travis Deyle, Cressel Anderson, Charles C. Kemp, and Matt Reynolds, IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), 2008
- Behaviors for Robust Door Opening and Doorway Traversal with a Force-Sensing Mobile Manipulator, Advait Jain and Charles C. Kemp, RSS Manipulation Workshop: Intelligence in Human Environments, 2008
- EL-E: An Assistive Robot that Fetches objects from Flat Surfaces, Hai Nguyen, Cressel Anderson, Alex Trevor, Advait Jain, Zhe Xu, and Charles C. Kemp, HRI Workshop on Robotic Helpers: User Interaction Interfaces and Companions in Assistive and Therapy Robots, 2008
- A Point-and-Click Interface for the Real World: Laser Designation of Objects for Mobile Manipulation, Charles C. Kemp, Cressel Anderson, Hai Nguyen, Alex Trevor, and Zhe Xu, 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2008